 订阅
订阅RobotStudio中Home点的创建(三)
来源:网络收集 点击: 时间:2024-02-08【导读】:
RobotStudio中,当路径生成后,我们总需要创建Home点,以使得机器人初始姿态保持一种相对漂亮的姿势,那么关节型目标点JointTarget在Robot Studio中如何创建的呢?让我们一起看看吧。工具/原料more电脑操作系统Win7及以上RobotStudio软件方法/步骤1/9分步阅读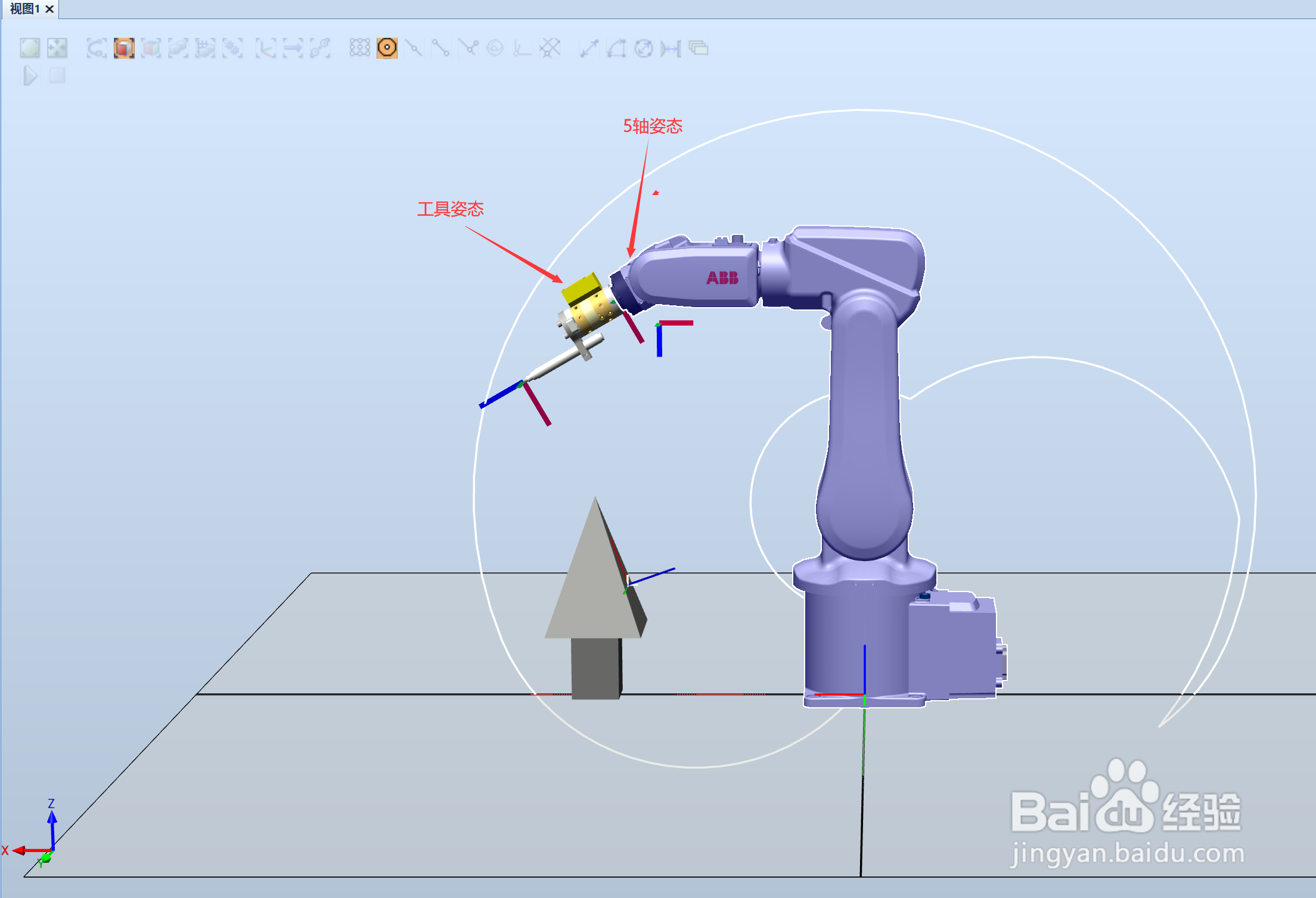 2/9
2/9 3/9
3/9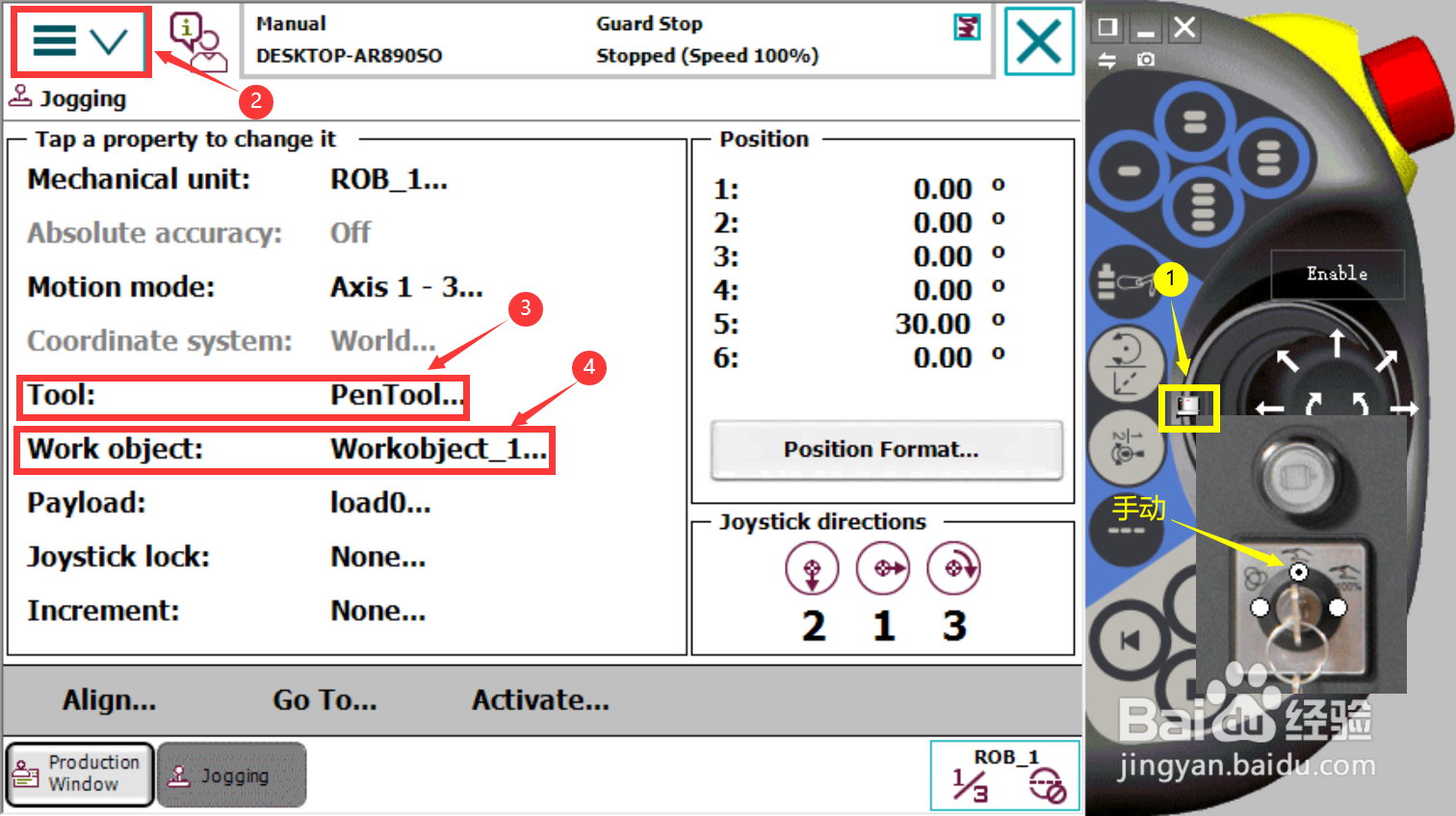 4/9
4/9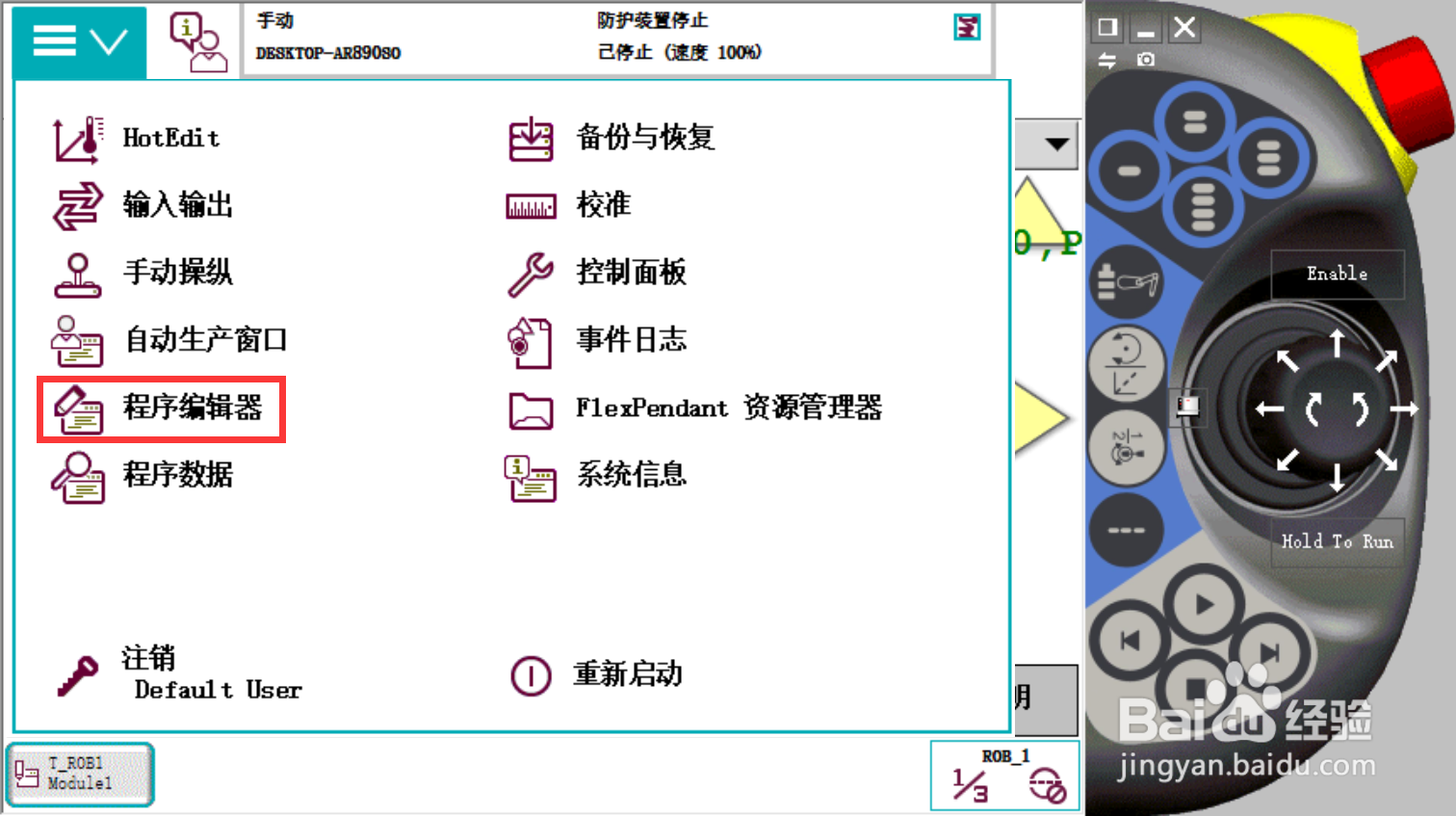 5/9
5/9 6/9
6/9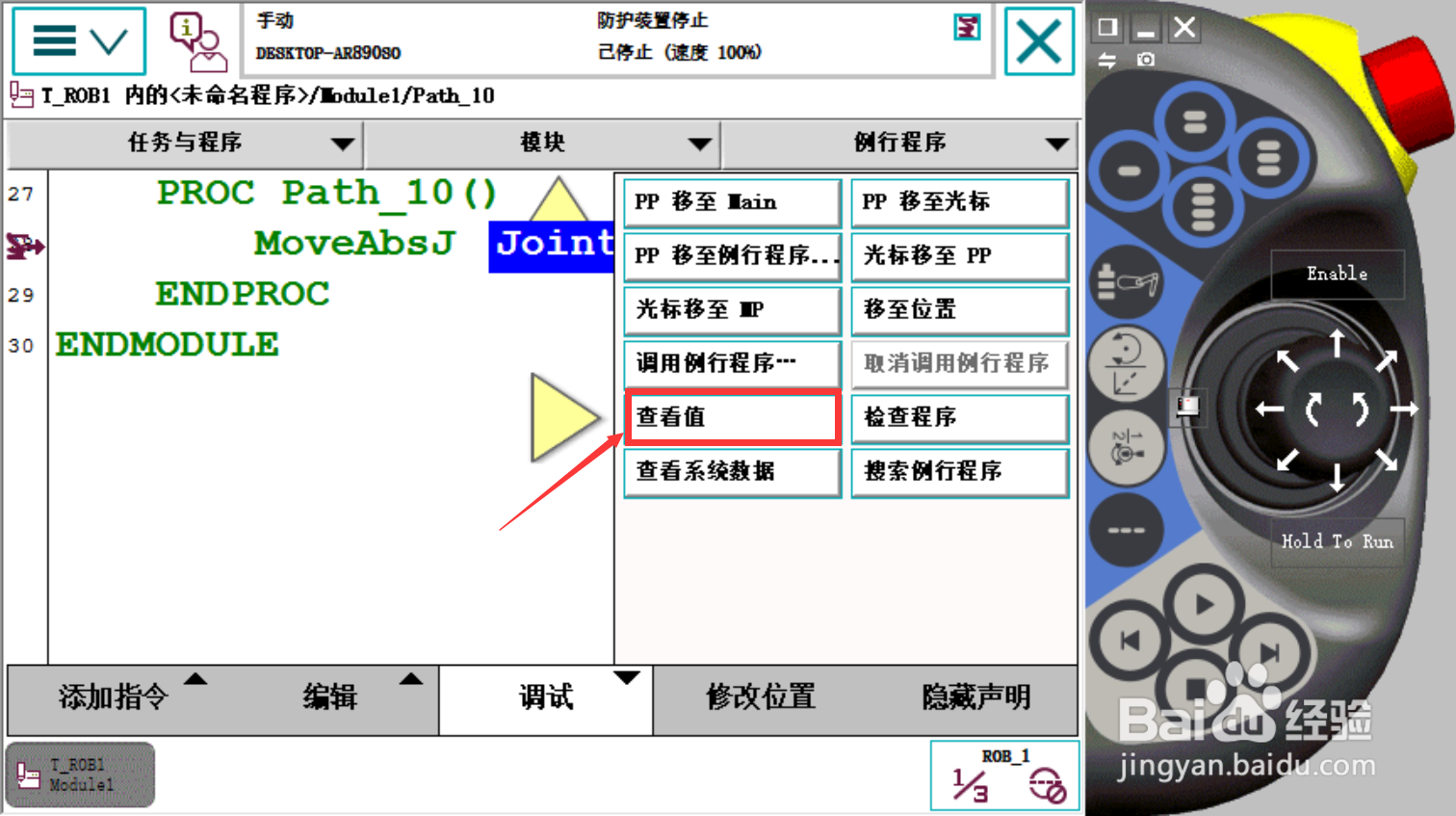 7/9
7/9 8/9
8/9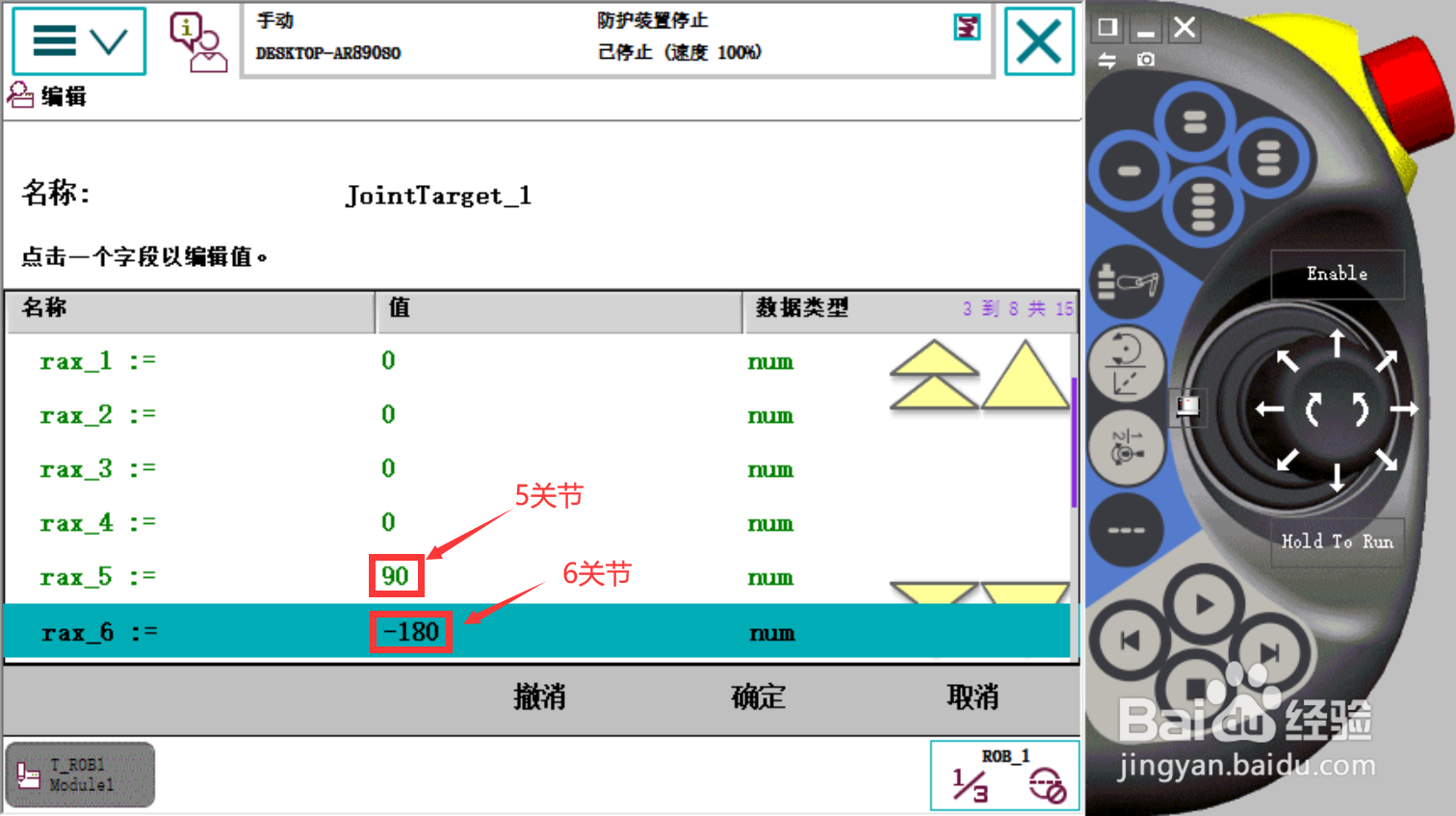 9/9
9/9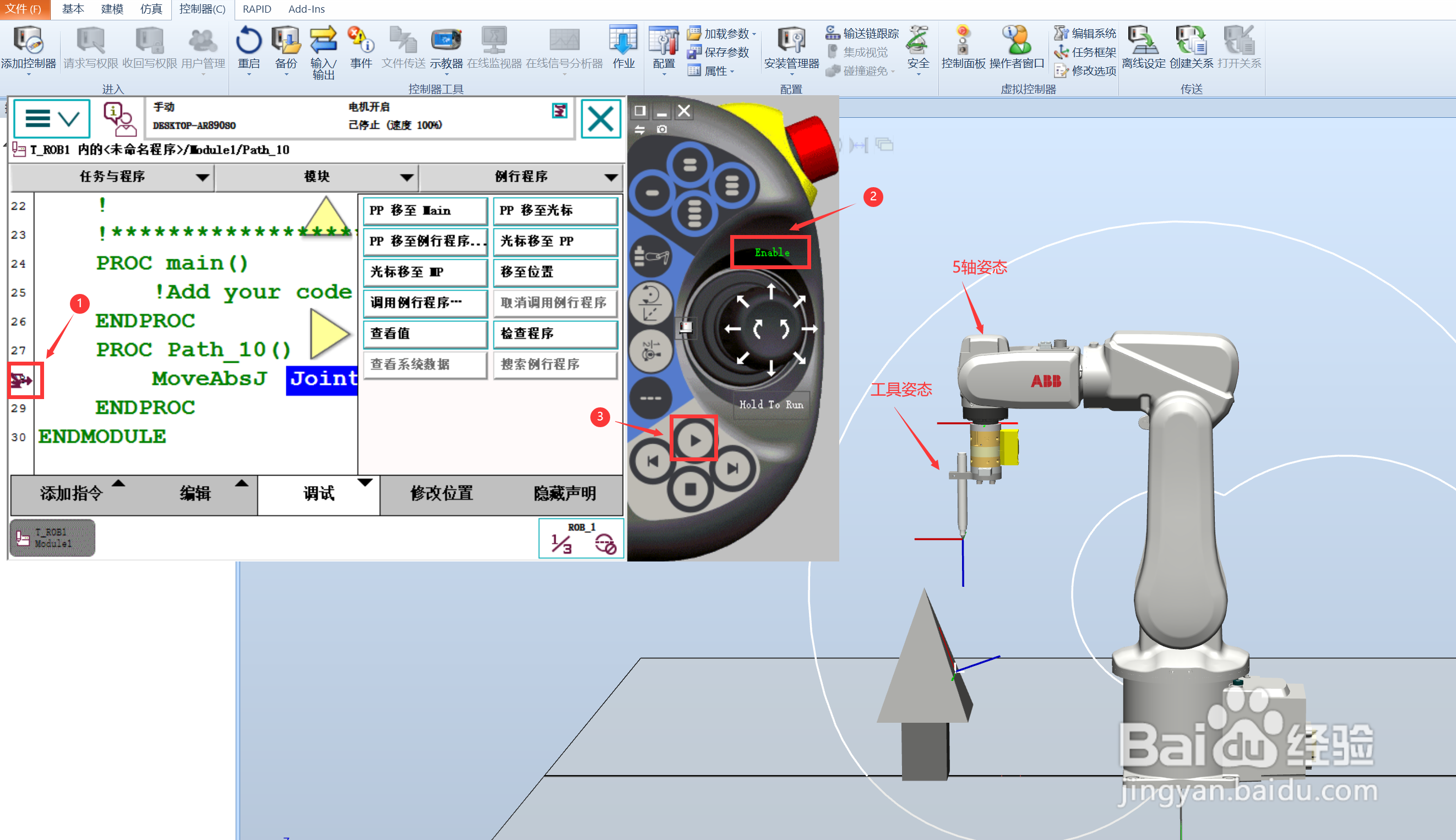 注意事项
注意事项
机器人初始位置,注意机器人工具和第5轴的姿态。
2/9启动虚拟示教器,【控制器】—【示教器】—【虚拟示教器】。
3/9调试虚拟示教器,【自动/手动】——左上角【下拉菜单】—【工具】—【工件坐标系】。
4/9进入【程序编辑器】。
5/9选中【JointTarget_1】—【调试】。
6/9选择【查看值】。
7/9查看机器人当前六个关节的值。
8/9修改机器关节值至Home点位置。
9/9Home点仿真操作—【Enable】—【启动】,注意观察工具姿态和第5轴的姿态变化。
注意事项请尝试用其它方法创建Home点。
对Robot Studio的应用将持续更新,敬请关注!
ROBOTSTUDIOABB工业机器人虚拟仿真示教器HOME点版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_14915.html
上一篇:强效饮食减肥法——黑木耳
下一篇:AutoCAD二维绘图训练四十五圆弧倒圆角