 订阅
订阅视觉图像:OpenCV矩阵的基本操作
来源:网络收集 点击: 时间:2024-02-28OpenCV矩阵的创建:
创建矩阵需要知道矩阵的尺寸大小和数据类型;
矩阵尺寸大小:就是m行n列;Size(5,5);
矩阵数据类型:深度8/32位,类型uchar/float,通道数1/3/4;
CV_8UC1// 8位无符号单通道
CV_8UC3// 8位无符号3通道
CV_8UC4// 8位无符号4通道
CV_32FC1// 32位浮点型单通道
CV_32FC3// 32位浮点型3通道
CV_32FC4// 32位浮点型4通道
一般,采用Mat类创建矩阵:
void main()
{
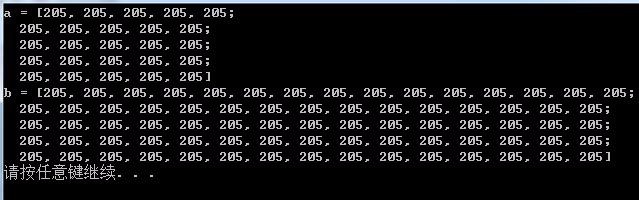
Mat a(Size(5,5),CV_8UC1);//单通道
couta = aendl;
Mat b = Mat(Size(5,5),CV_8UC3);//3通道
coutb = bendl;
system(pause);
}
【注】:3通道矩阵中,一个矩阵元素包含3个变量;
【注】:Mat创建矩阵,默认通过随机值初始化矩阵数值;
 2/11
2/11矩阵初始化:
Mat类几种初始化创建方法:
void main()
{
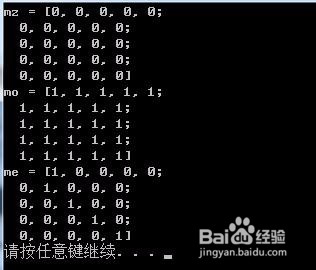
Mat mz = Mat::zeros(Size(5,5),CV_8UC1);//全0矩阵
Mat mo = Mat::ones(Size(5,5),CV_8UC1);//全1矩阵
Mat me = Mat::eye(Size(5,5),CV_32FC1);//对角线为1的对角矩阵
coutmz = mzendl;
coutmo = moendl;
coutme = meendl;
system(pause);
}
 3/11
3/11OpenCV矩阵运算:Mat类支持所有矩阵运算;
①使用”+”,”-”符进行矩阵加减运算:
void main()
{
Mat a = Mat::eye(Size(3,2),CV_32FC1);
Mat b = Mat::ones(Size(3,2),CV_32FC1);
Mat c = a+b;
Mat d = a-b;
couta = \n aendl;
coutb = \n bendl;
coutc = \n cendl;
coutd = \n dendl;
system(pause);
}
 4/11
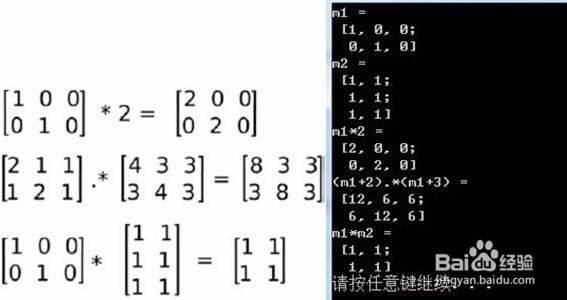
4/11矩阵乘法:“*”,“.*”
①使用“*”表示矩阵与标量相乘;
②矩阵与矩阵相乘“*”:满足矩阵相乘条件;
③矩阵和矩阵点乘“.mul()”,对应元素相乘;
void main()
{
Mat m1 = Mat::eye(2,3,CV_32FC1);
Mat m2 = Mat::ones(3,2,CV_32FC1);
coutm1 = \n m1endl;
coutm2 = \n m2endl;
coutm1*2 = \n m1*2endl;//矩阵*标量
cout(m1+2).*(m1+3) = \n (m1+2).mul(m1+3)endl;//矩阵点乘
coutm1*m2 = \n m1*m2endl;//矩阵相乘
system(pause);
}
 5/11
5/11矩阵转置:矩阵的行与列对调;
由Mat类t()函数实现:
void main()
{
Mat m1 = Mat::eye(4,6,CV_32FC1);
coutm1 = \n m1endl;
Mat m1t = m1.t();
coutm1t = \n m1tendl;
system(pause);
}
 6/11
6/11矩阵的逆:
有两种方法:
①伴随阵法:inv(A)=(1/|A|)×A* ;
其中inv(A)表示矩阵A的逆矩阵,|A|为矩阵A的行列式的值,A*为矩阵A的伴随矩阵。
②行初等变换法:(A|E)经过初等变换得到(E|A^(-1));
【注】:初等变化只用行(列)运算,不能用列(行)运算,E为单位矩阵;
Mat矩阵的逆由inv()函数实现:
void main()
{
Mat m1 = Mat::eye(5,5,CV_32FC1);
coutm1 = \n m1endl;
Mat m1inv = m1.inv();
coutm1inv = \n m1invendl;
system(pause);
}
 7/11
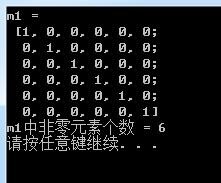
7/11矩阵中非零元素个数:
计算物体的像素或面积常需要用到计算矩阵中的非零元素个数;
OpenCV中使用countNonZero()函数实现。
void main()
{
Mat m1 = Mat::eye(6,6,CV_32FC1);
coutm1 = \n m1endl;
int m1num = countNonZero(m1);
coutm1中非零元素个数 = m1numendl;
system(pause);
}
 8/11
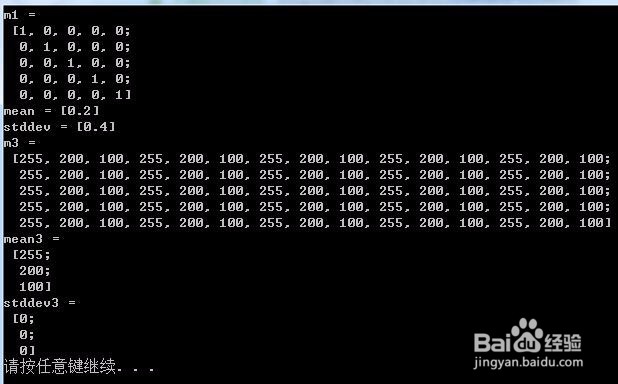
8/11均值和标准差:
OpenCV提供了矩阵均值和标准差计算功能,
使用meanStdDev(src,mean,stddev)函数实现;
src – 输入矩阵或图像
mean – 均值,OutputArray
stddev – 标准差,OutputArray
void main()
{
Mat m1 = Mat::eye(5,5,CV_32FC1);
coutm1 = \n m1endl;
Mat mean,stddev;
meanStdDev(m1,mean,stddev);
coutmean = meanendl;
coutstddev = stddevendl;
Mat m3(Size(5,5),CV_8UC3,Scalar(255,200,100));
coutm3 = \n m3endl;
Mat mean3,stddev3;
meanStdDev(m3,mean3,stddev3);
coutmean3 = \n mean3endl;
coutstddev3 = \n stddev3endl;
system(pause);
}
【注】:当src为多通道或多维矩阵时,则函数分别计算不同通道的均值与标准差,因此返回的mean和stddev为对应维度的向量;
 9/11
9/11求矩阵中元素的最大值最小值:
求输入矩阵的全局最大最小值及其位置,可使用函数:
void minMaxLoc( InputArray src,
CV_OUT double* minVal,
CV_OUT double* maxVal=0,
CV_OUT Point* minLoc=0,
CV_OUT Point* maxLoc=0,
InputArray mask=noArray());
参数:
src – 输入单通道矩阵(图像).
minVal – 指向最小值的指针, 如果未指定则使用NULL
maxVal – 指向最大值的指针, 如果未指定则使用NULL
minLoc – 指向最小值位置(2维情况)的指针, 如果未指定则使用NULL
maxLoc – 指向最大值位置(2维情况)的指针, 如果未指定则使用NULL
mask – 可选的蒙版,用于选择待处理子区域
int main()
{
Mat img = imread(raw.jpg,0);
imshow(raw_img,img);
double minVal = 0, maxVal = 0;
Point minPt,maxPt;
minMaxLoc(img,minVal,maxVal,minPt,maxPt);
coutmin value = minValendl;
coutmax value = maxValendl;
coutminPt = (minPt.x,minPt.y)endl;
coutmaxPt = (maxPt.x,maxPt.y)endl;
Rect rectMin(minPt.x-50,minPt.y-50,100,100);
Rect rectMax(maxPt.x-50,maxPt.y-50,100,100);
rectangle(img,rectMin,Scalar(200),2);
rectangle(img,rectMax,Scalar(255),2);
imshow(image with min max location,img);
waitKey(0);
return 0;
}
 10/11
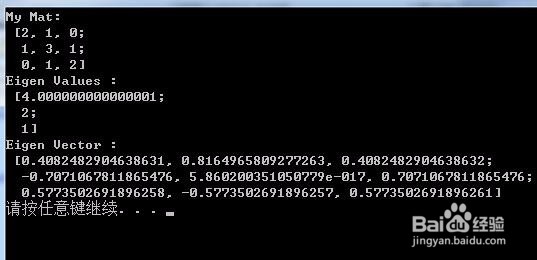
10/11计算矩阵的特征值和特征向量;
正定矩阵(positive definite matrix):矩阵的特征值都是正数;
半正定矩阵(semi-definite matrix):矩阵的特征值都是非负数(正数和0);
判断矩阵是否正定或者半正定就需要计算矩阵的特征值和特征向量,
使用OpenCV中的eigen()函数进行计算;
#include opencv2\opencv.hpp
using namespace std;
using namespace cv;
int main()
{
double myArray =
{
2, 1, 0,
1, 3, 1,
0, 1, 2
};
Mat myMat = Mat(3, 3, CV_64FC1, myArray);//创建矩阵
cout My Mat: \n myMatendl;
Mat eValuesMat;//特征值
Mat eVectorsMat;//特征向量
eigen(myMat, eValuesMat, eVectorsMat);
cout Eigen Values : \n eValuesMatendl;
cout Eigen Vector : \n eVectorsMatendl;
system(pause);
return 0;
}
 11/11
11/11其他矩阵运算:
Function (函数名) Use (函数用处)
add:矩阵加法,A+B的更高级形式,支持mask;
scaleAdd:矩阵加法,缩放因子dst(I) = scale * src1(I) + src2(I);
addWeighted:矩阵加法,缩放因子dst(I) = saturate(src1(I) * alpha + src2(I) * beta + gamma);
subtract:矩阵减法,A-B的更高级形式,支持mask;
multiply:矩阵逐元素乘法,同Mat::mul()函数,与A*B区别,支持mask;
gemm:一个广义的矩阵乘法操作;
divide:矩阵逐元素除法,与A/B区别,支持mask;
abs:对每个元素求绝对值;
absdiff:两个矩阵的差的绝对值;
exp求每个矩阵元素 src(I) 的自然数 e 的 src(I) 次幂 dst = esrc(I);
pow求每个矩阵元素 src(I) 的 p 次幂 dst = src(I)p;
log求每个矩阵元素的自然数底 dst = log|src(I)| (if src != 0);
sqrt求每个矩阵元素的平方根;
min, max求每个元素的最小值或最大值返回这个矩阵 dst(I) = min(src1(I), src2(I)), max同minMaxLoc定位矩阵中最小值、最大值的位置;
compare返回逐个元素比较结果的矩阵;
bitwise_and, bitwise_not, bitwise_or, bitwise_xor每个元素进行位运算,分别是和、非、或、异或;
cvarrToMat旧版数据CvMat,IplImage,CvMatND转换到新版数据Mat;
extractImageCOI从旧版数据中提取指定的通道矩阵给新版数据Mat;
randu以Uniform分布产生随机数填充矩阵,同 RNG::fill(mat, RNG::UNIFORM);
randn以Normal分布产生随机数填充矩阵,同 RNG::fill(mat, RNG::NORMAL);
randShuffle随机打乱一个一维向量的元素顺序;
theRNG()返回一个默认构造的RNG类的对象,theRNG()::fill(...);
reduce矩阵缩成向量;
repeat矩阵拷贝的时候指定按x/y方向重复;
split多通道矩阵分解成多个单通道矩阵;
merge多个单通道矩阵合成一个多通道矩阵;
mixChannels矩阵间通道拷贝,如Rgba到Rgb和Alpha;
sort, sortIdx为矩阵的每行或每列元素排序;
setIdentity设置单元矩阵;
completeSymm矩阵上下三角拷贝;
inRange检查元素的取值范围是否在另两个矩阵的元素取值之间,返回验证矩阵;
checkRange检查矩阵的每个元素的取值是否在最小值与最大值之间,返回验证结果bool;
sum求矩阵的元素和;
mean求均值;
meanStdDev均值和标准差;
countNonZero统计非零值个数;
cartToPolar, polarToCart笛卡尔坐标与极坐标之间的转换;
flip矩阵翻转;
transpose矩阵转置,比较 Mat::t() AT;
trace矩阵的迹;
determinant行列式 |A|, det(A);
eigen矩阵的特征值和特征向量;
invert矩阵的逆或者伪逆,比较 Mat::inv();
magnitude向量长度计算 dst(I) = sqrt(x(I)2 + y(I)2);
Mahalanobis距离计算;
phase相位计算,即两个向量之间的夹角;
norm求范数,1-范数、2-范数、无穷范数;
normalize标准化;
mulTransposed矩阵和它自己的转置相乘 AT * A, dst = scale(src - delta)T(src - delta);
convertScaleAbs先缩放元素再取绝对值,最后转换格式为8bit型;
calcCovarMatrix计算协方差阵;
solve求解1个或多个线性系统或者求解最小平方问题(least-squares problem);
solveCubic求解三次方程的根;
solvePoly求解多项式的实根和重根;
dct, idct正、逆离散余弦变换,idct同dct(src, dst, flags | DCT_INVERSE);
dft, idft正、逆离散傅立叶变换, idft同dft(src, dst, flags | DTF_INVERSE);
LUT查表变换;
getOptimalDFTSize返回一个优化过的DFT大小;
mulSpecturms两个傅立叶频谱间逐元素的乘法;
注意事项eigen:矩阵的特征值和特征向量
absdiff:两个矩阵的差的绝对值
minMaxLoc:定位矩阵中最小值、最大值的位置
矩阵OPENCV矩阵图像矩阵矩阵操作矩阵特征值版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_161675.html