 订阅
订阅汽车总动员(无人驾驶)项目的基础方法
来源:网络收集 点击: 时间:2024-02-12【导读】:
汽车总动员(无人驾驶)是萝卜圈提供的一个比较经典的机器人设计项目,目前已经在全国十多个省区开展了竞技活动,相信使用萝卜圈的老师和同学们会经常用到。无人驾驶是个极为复杂的系统工程,下面仅为大家介绍汽车总动员项目玩法中最基础的“居中行走”方法。工具/原料more1.5.1.8版本以上萝卜圈机器人方法/步骤1/4分步阅读 2/4
2/4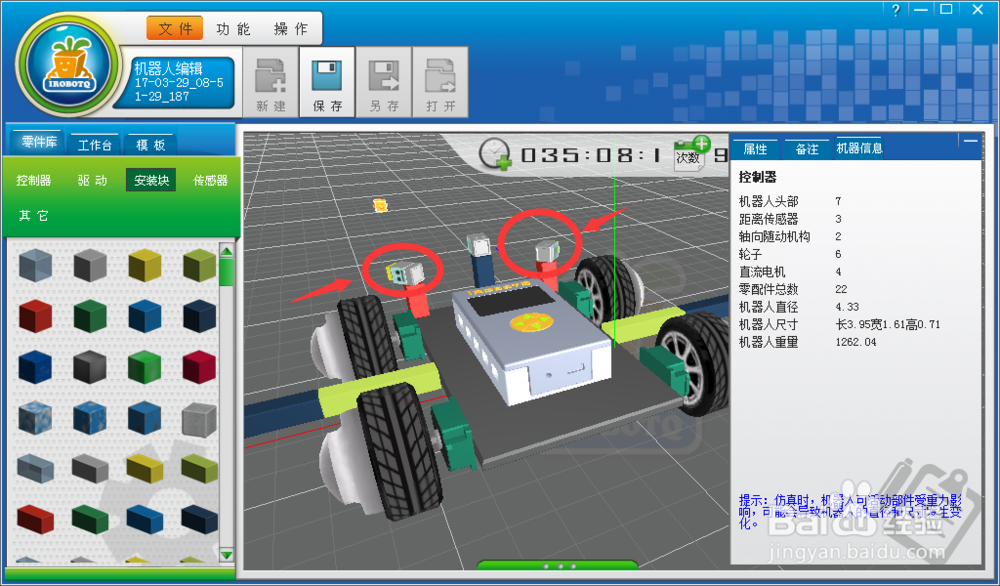 3/4
3/4 4/4
4/4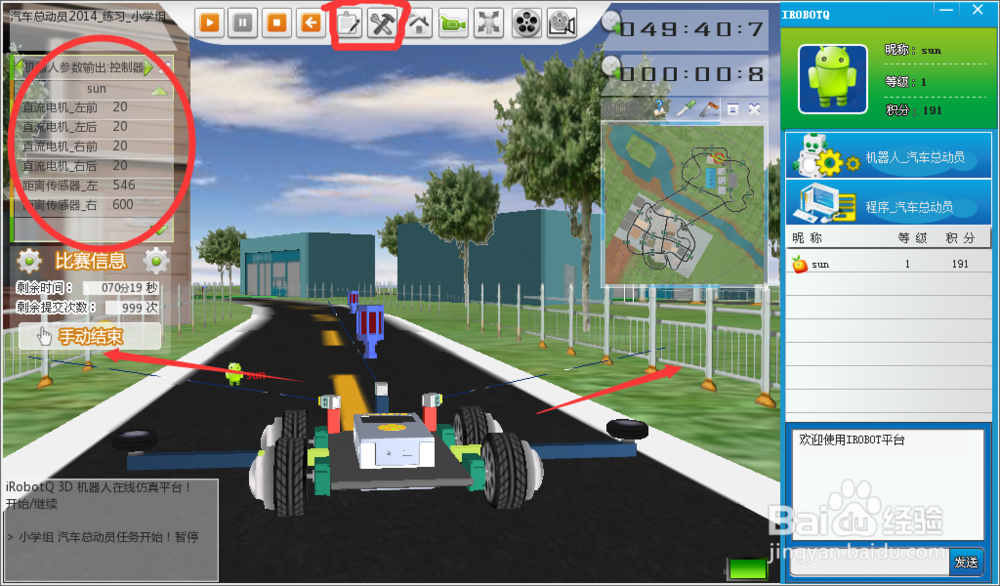 注意事项
注意事项
任务分析——进入汽车总动员项目的三维场景,观察汽车运动的道路及周围可利用的参照物如道路标线、路边护栏等,并分析不同参照物的效率高低,确定选择路两边护栏作为参照物,可通过测距传感器来获得参照信息。通过以上分析可确定基础解决方案。
2/4设计机器人——基于基础解决方案设计一个具有运动结构(有四轮运动结构),并能获取道路两边护栏距离信息(两边各安装距离传感器)的机器人。
3/4设计算法——通过比较两边距离传感器返回的护栏距离值的差值,来确定车子在道路中的位置信息,进而分析会有三种位置状态出现:
1、左边大于右边(表示车子离左边远)、2、右边大于左边(表示车子离右边远)、3、左右两边大概相等(表示车子基本在中间)。
分析三种状态后可推出三种状态下车子的后续动作应为:1、左转,2、右转,3、前进。
三个条件,通过两个条件判断嵌套实现分支,外加一个永远循环实现实时判断和姿态调整。
为了让车子调整不过于频繁,我们把左右两边的差值给一个冗余量比如100,表示我们可以接受车子在道路的相对中间就可以了。
4/4运行调试——将制作好的机器人和程序加载进入汽车总动员(无人驾驶)场地,观察运动姿态并进行实时调试。
注意事项车子的结构如轴距、重心控制、传感器的位置和角度,需要和程序紧密配合以达到较好的运行效果
版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_25255.html
上一篇:excel条件格式设置填充颜色
下一篇:MOMO陌陌的应用外小窗口在哪里开启?