 订阅
订阅怎样做一个行走机器人
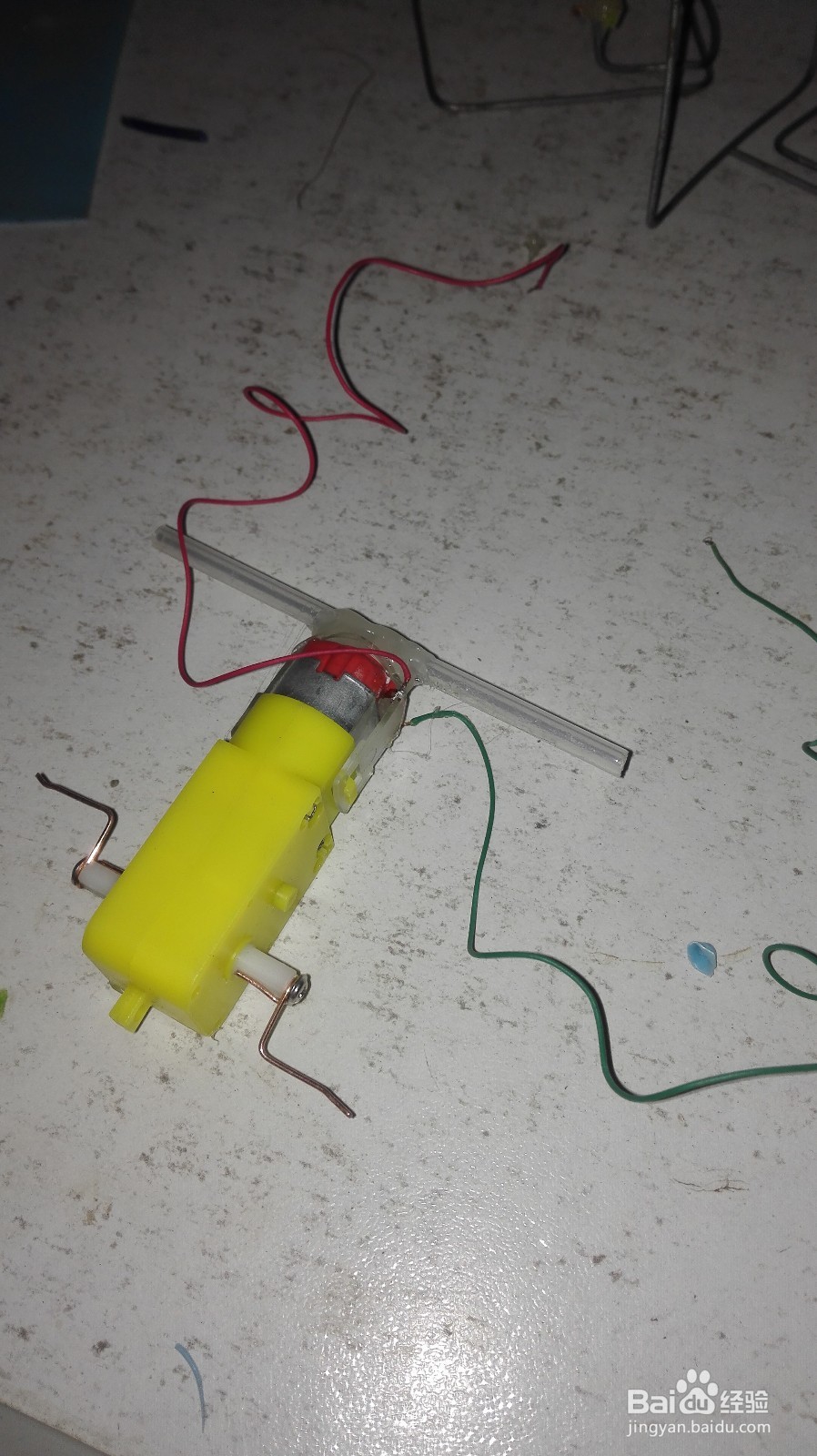
来源:网络收集 点击: 时间:2024-03-11第一步,截取两根长约5cm的1mm铜线,使用螺丝将铜线固定在马达变速箱的轴上。具体做法是先将螺丝钉旋入轴中,再用钳子把铜线夹在轴上,让铜线绕螺丝钉一周,在用螺丝刀将螺丝旋紧,另外一边方法相同(两边的铜线程180度)



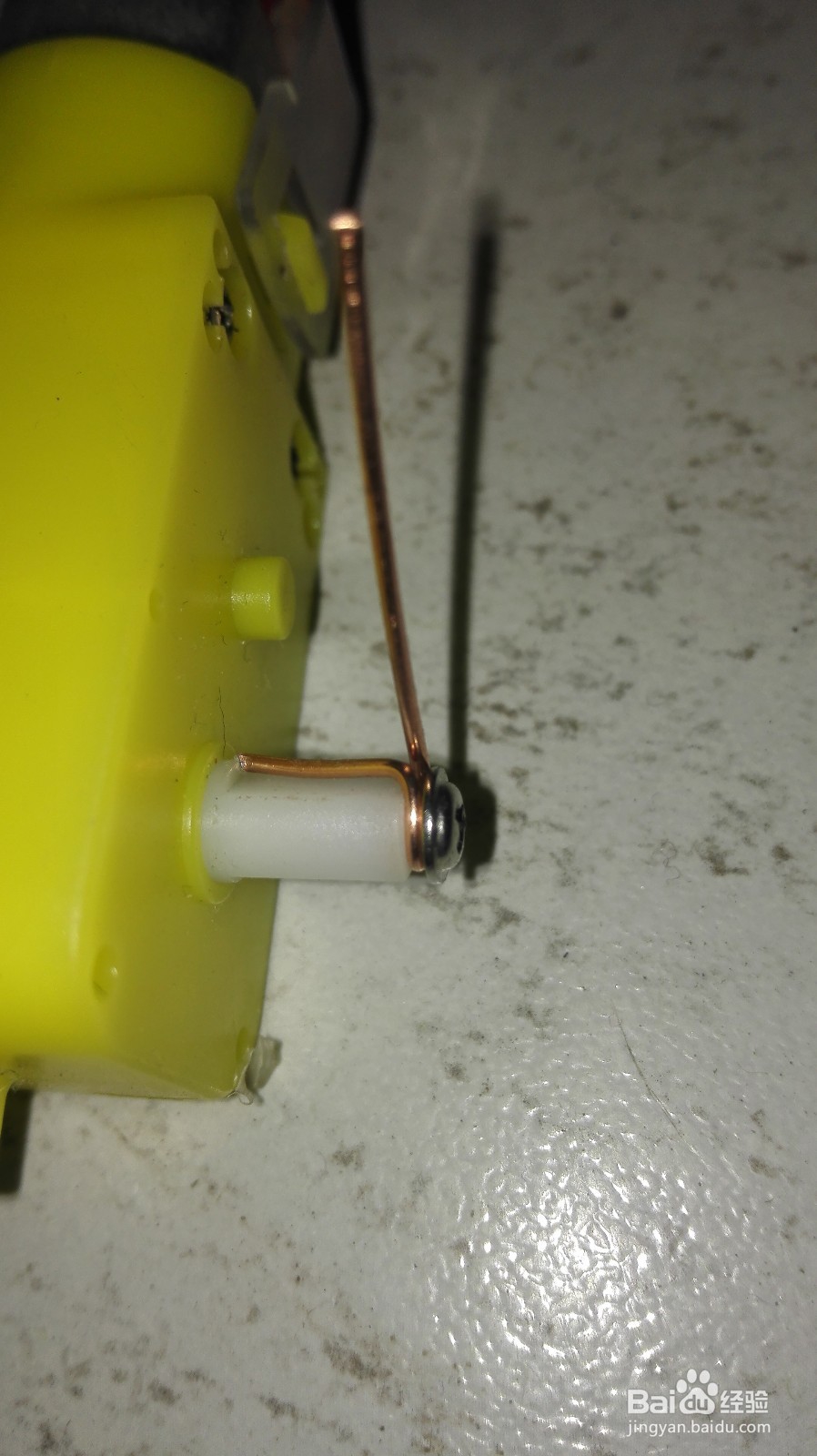
 2/11
2/11如图。将还是笔直的铜线弯折90度,弯折点到螺丝中心的距离大约为1cm(注意两边弯折得要相同,不然机器人容易颠簸)
 3/11
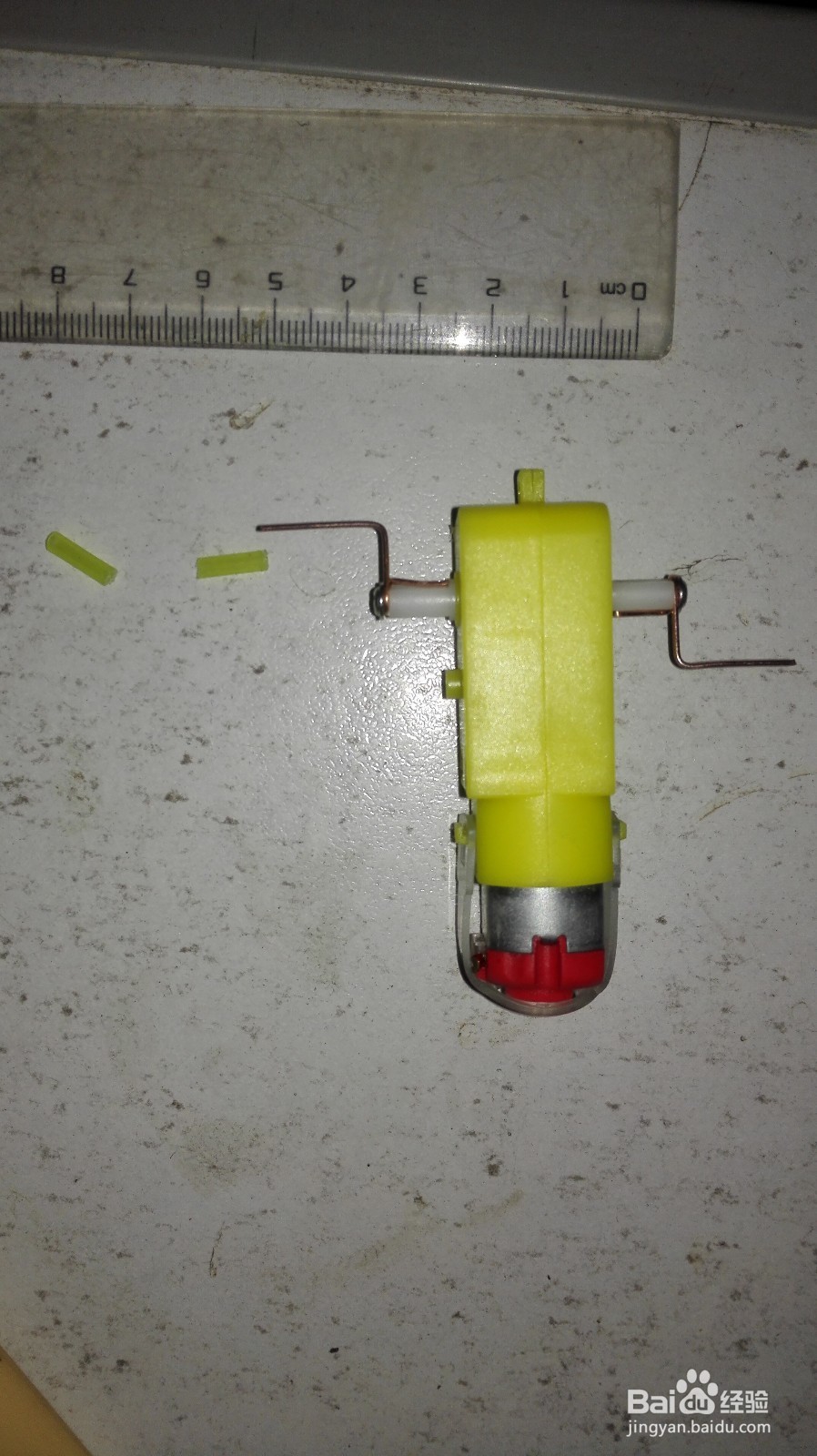
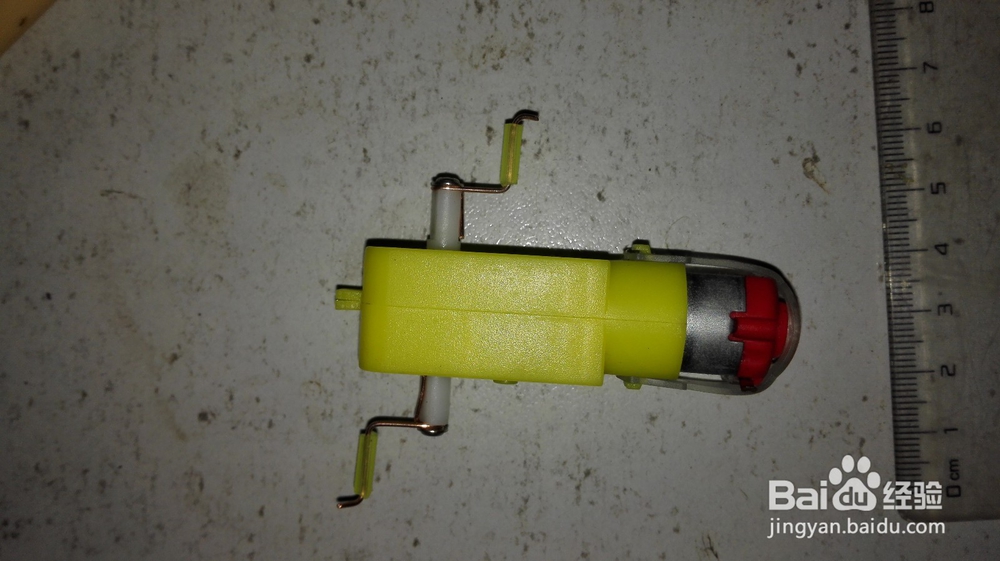
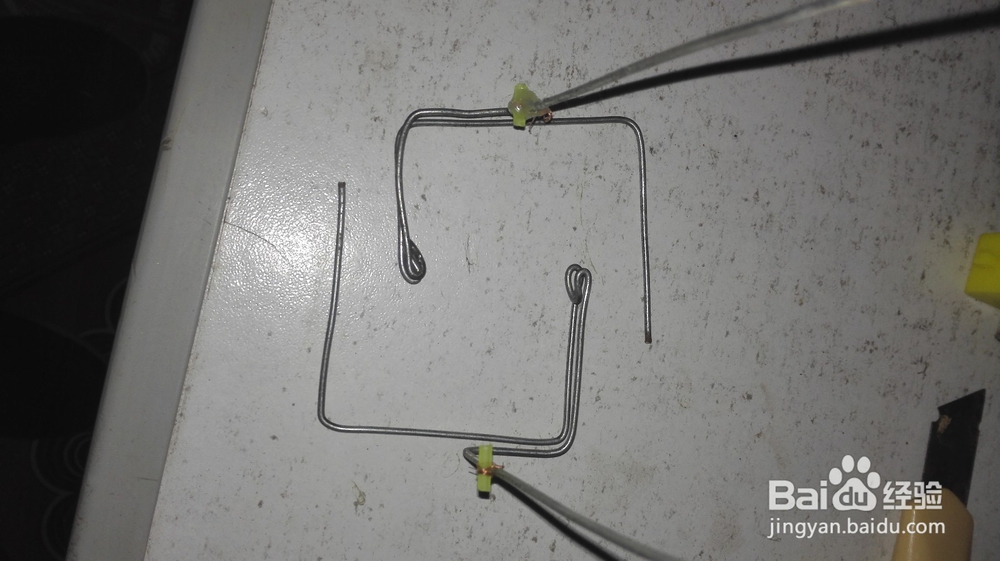
3/11取出铁丝,取4.5cm弯折90度(图中参数有错,区4.5cm,下同),再取6.8cm弯折90度,之后弯折方法如图所示,最后,取2.5cm距离,将铁丝向上弯折90度。按照相同;方法做出两个机械脚(后面步骤还会对脚进行处理,请仔细查看图片)



 4/11
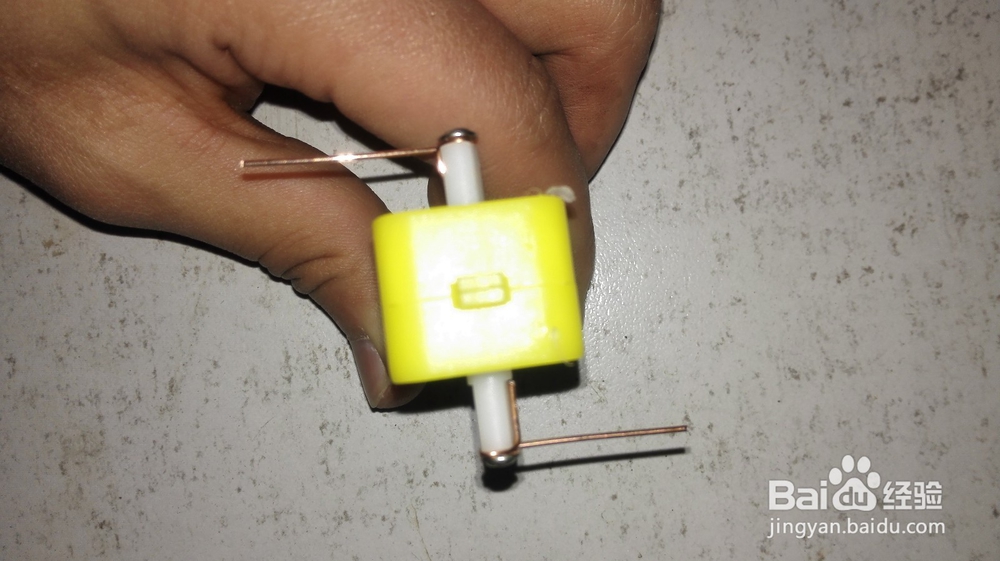
4/11截取1cm左右塑料棒,共截两根,它们将套在铜线上

 5/11
5/11取下塑料棒,用细铜丝粗略固定在机械脚上(可以上下移动,方便调整),如图所示,将机械脚和变速箱连接,铜线一上一下,确定好两根塑料棒的位置,在使用热熔胶枪将其牢牢固定


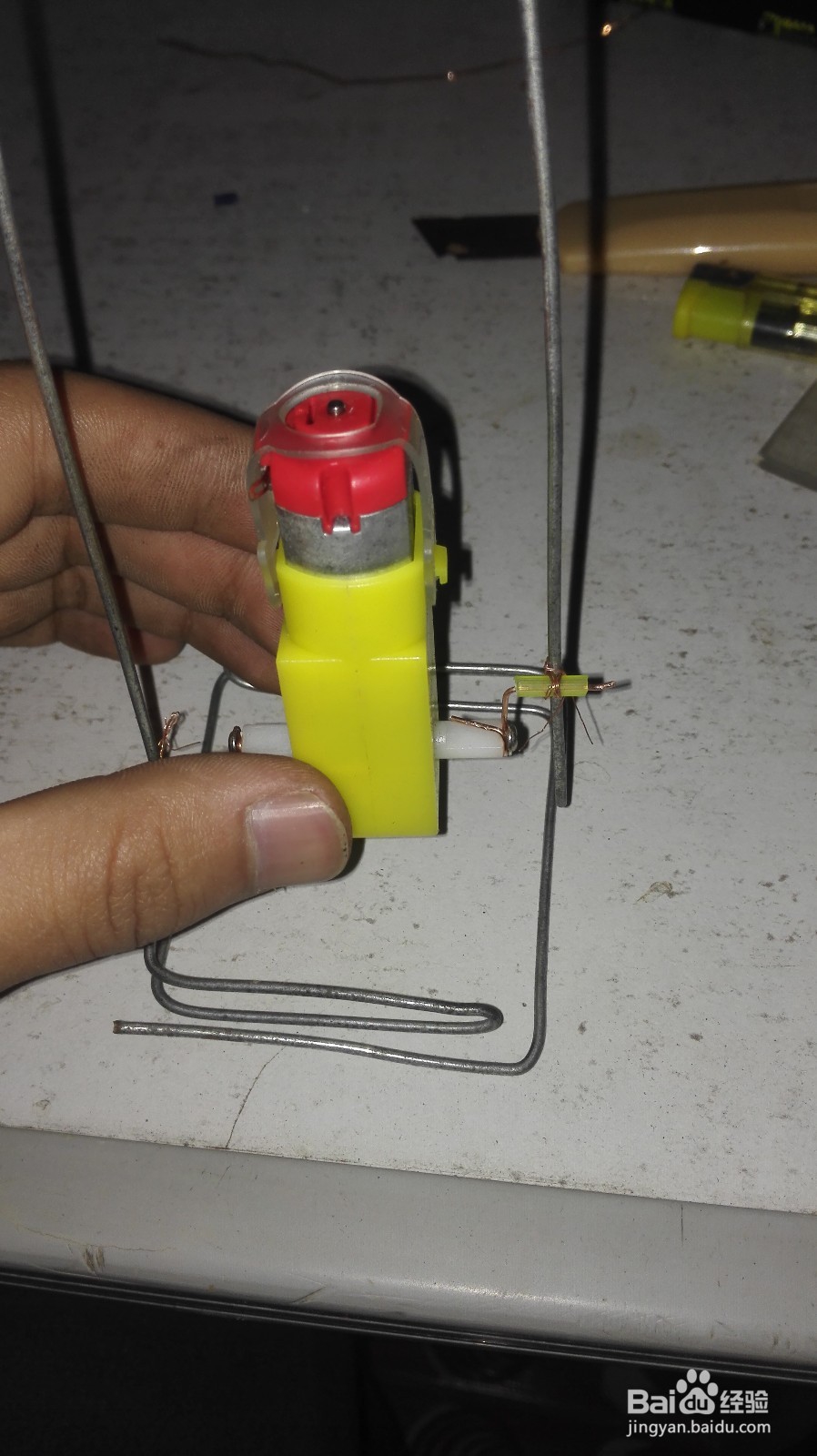

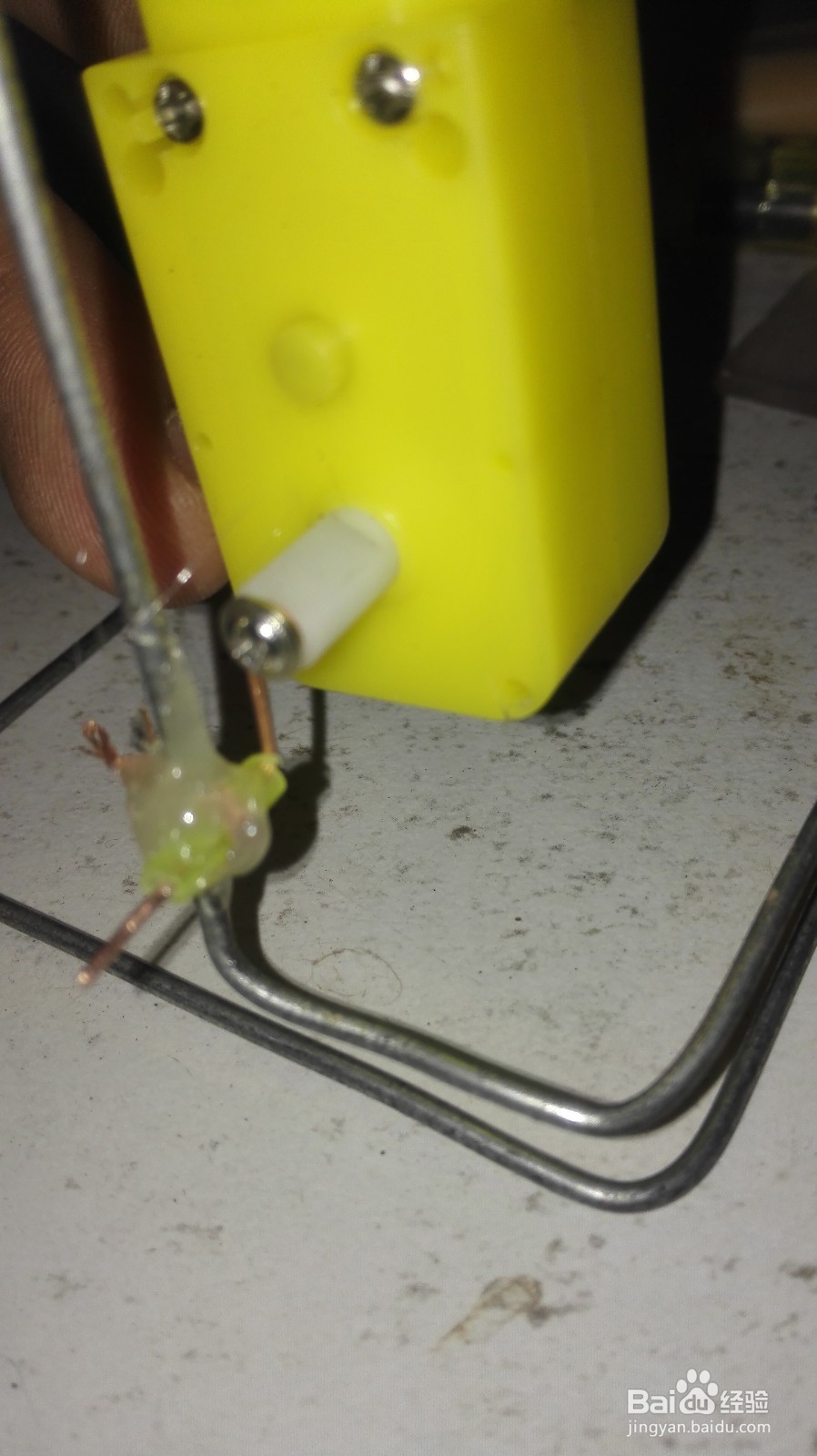
 6/11
6/11如图,将两脚进行一下处理,注意两条铁丝之间缝隙越小越好
 7/11
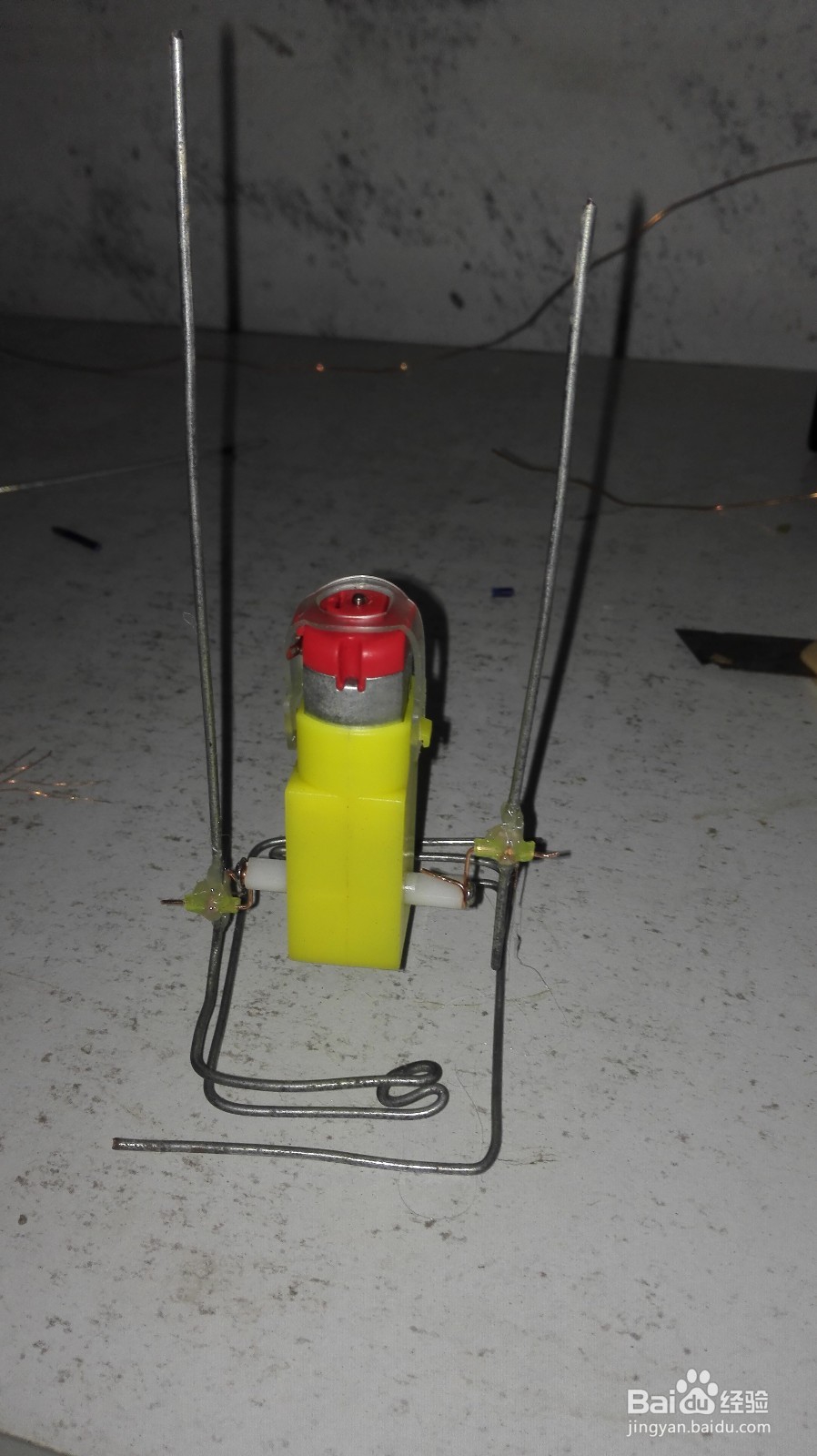
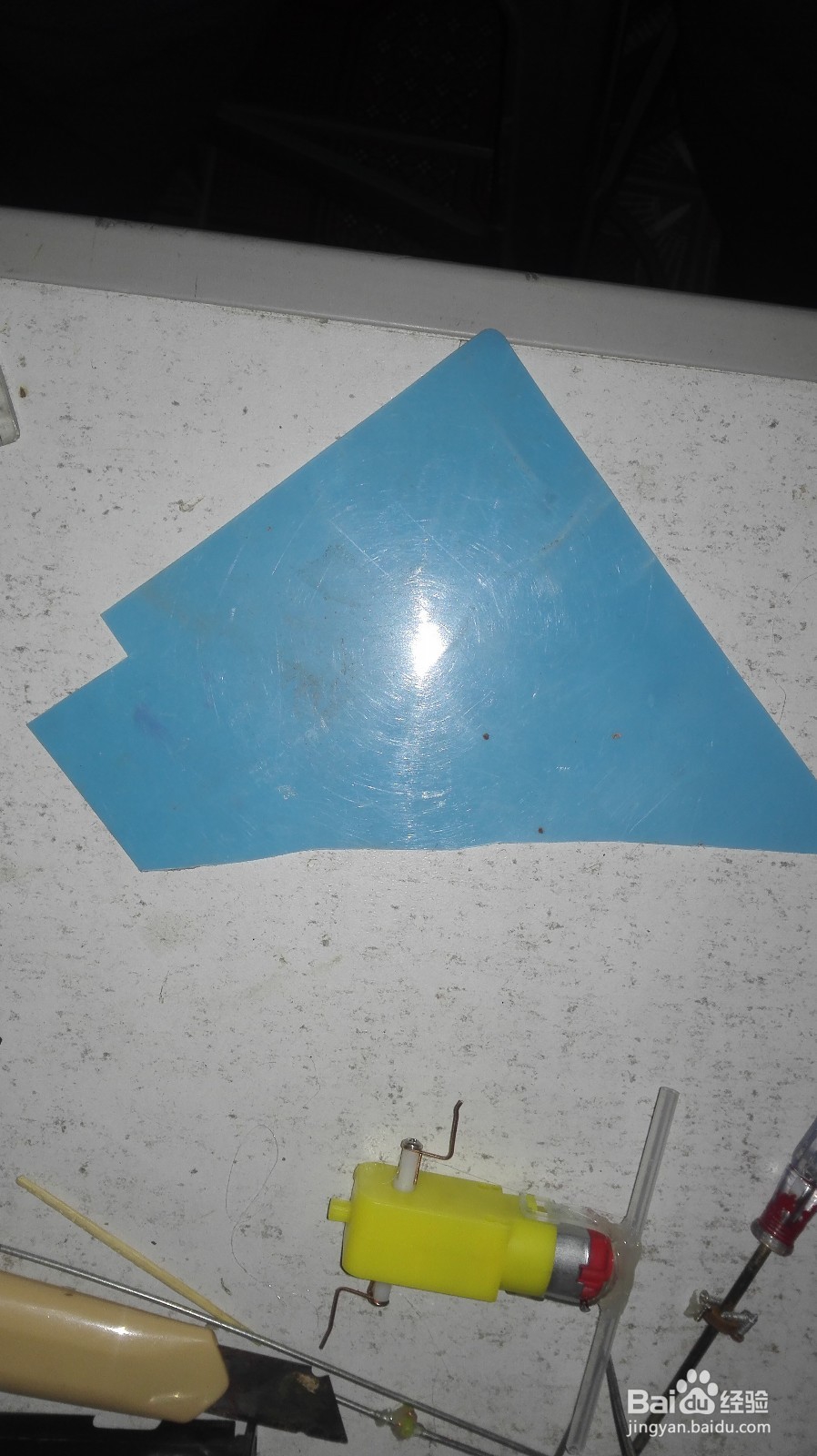
7/11下一步,在变速箱是哪个加装定位杆,截取9cm的笔芯,用热熔胶固定在马达上方,注意不要将马达黏住了

 8/11
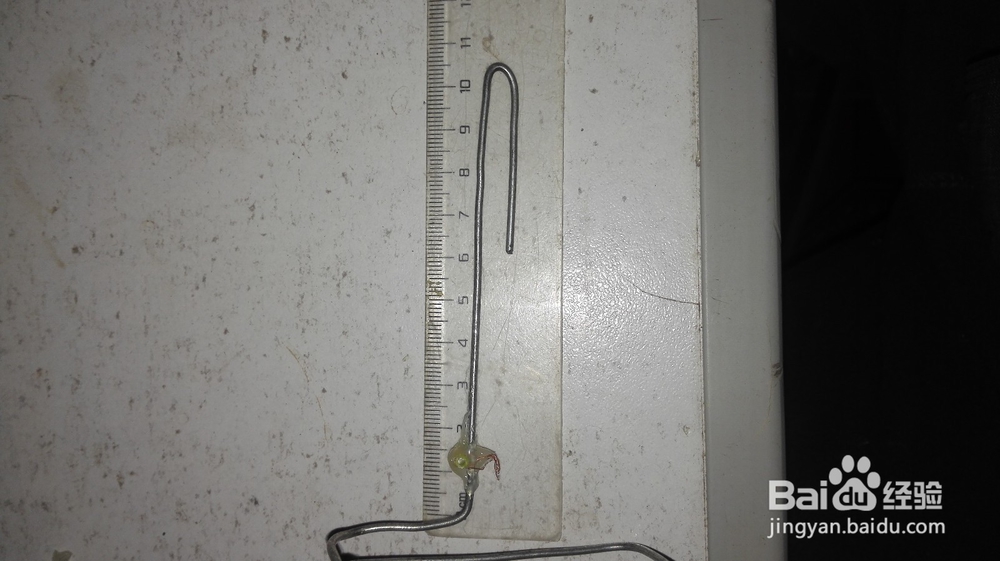
8/11再取10.5cm左右距离,将铁丝尾端弯成U型,使U型可将笔芯套住

 9/11
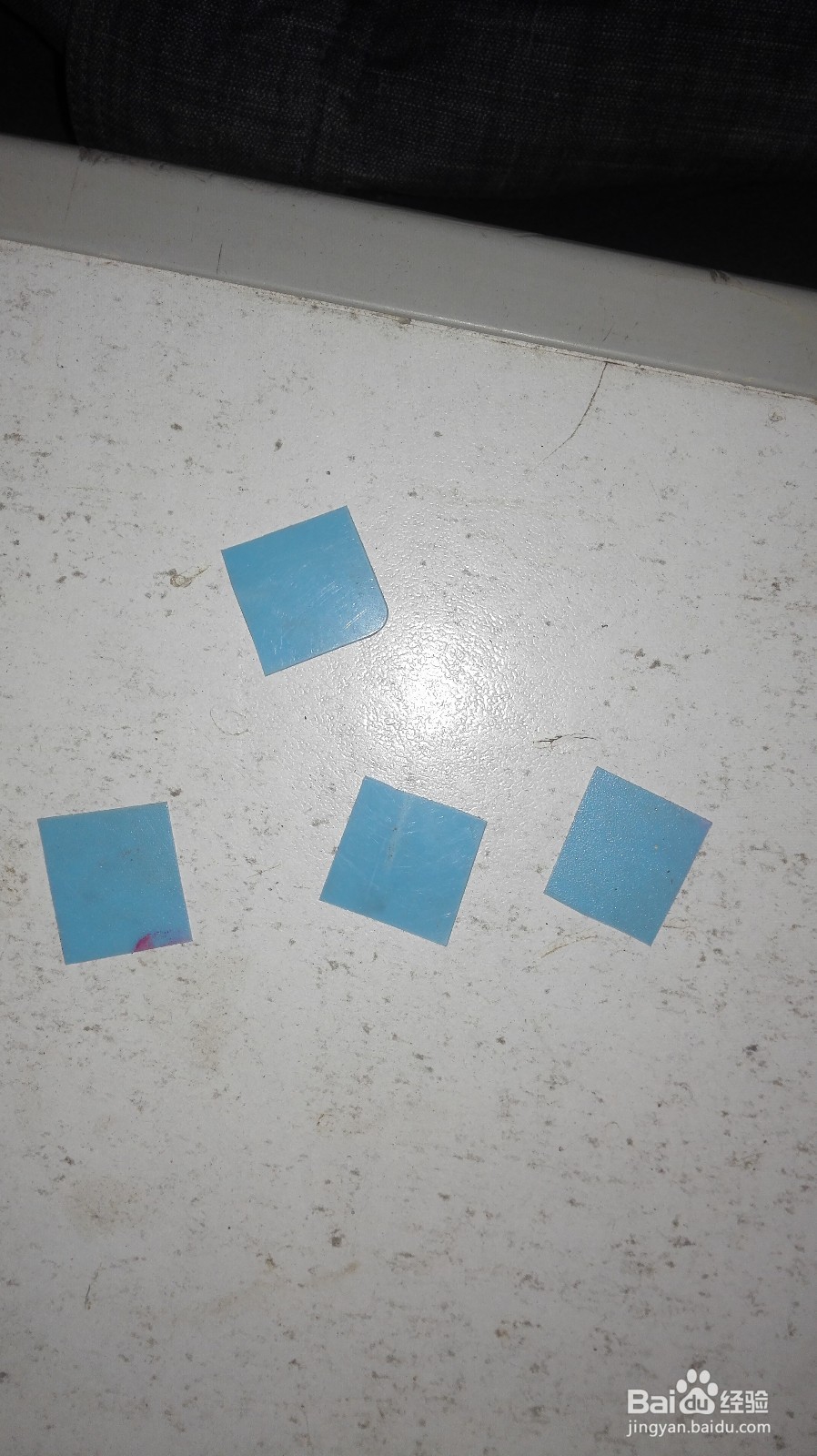
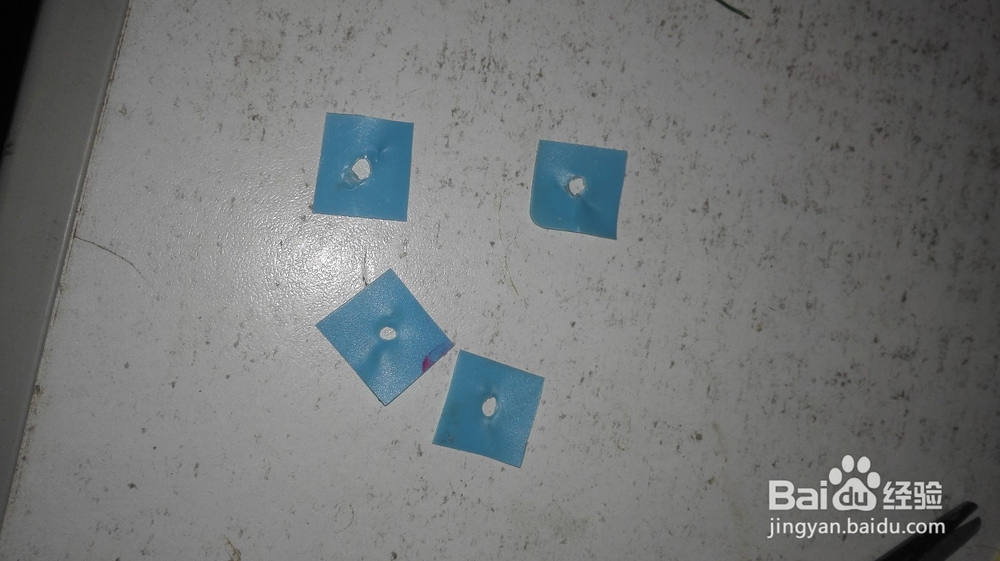
9/11剪下四个边长为2cm的正方形片,并在中央打上直径与笔芯略大的孔,之后将两根导线焊在马达两个电极上
 10/11
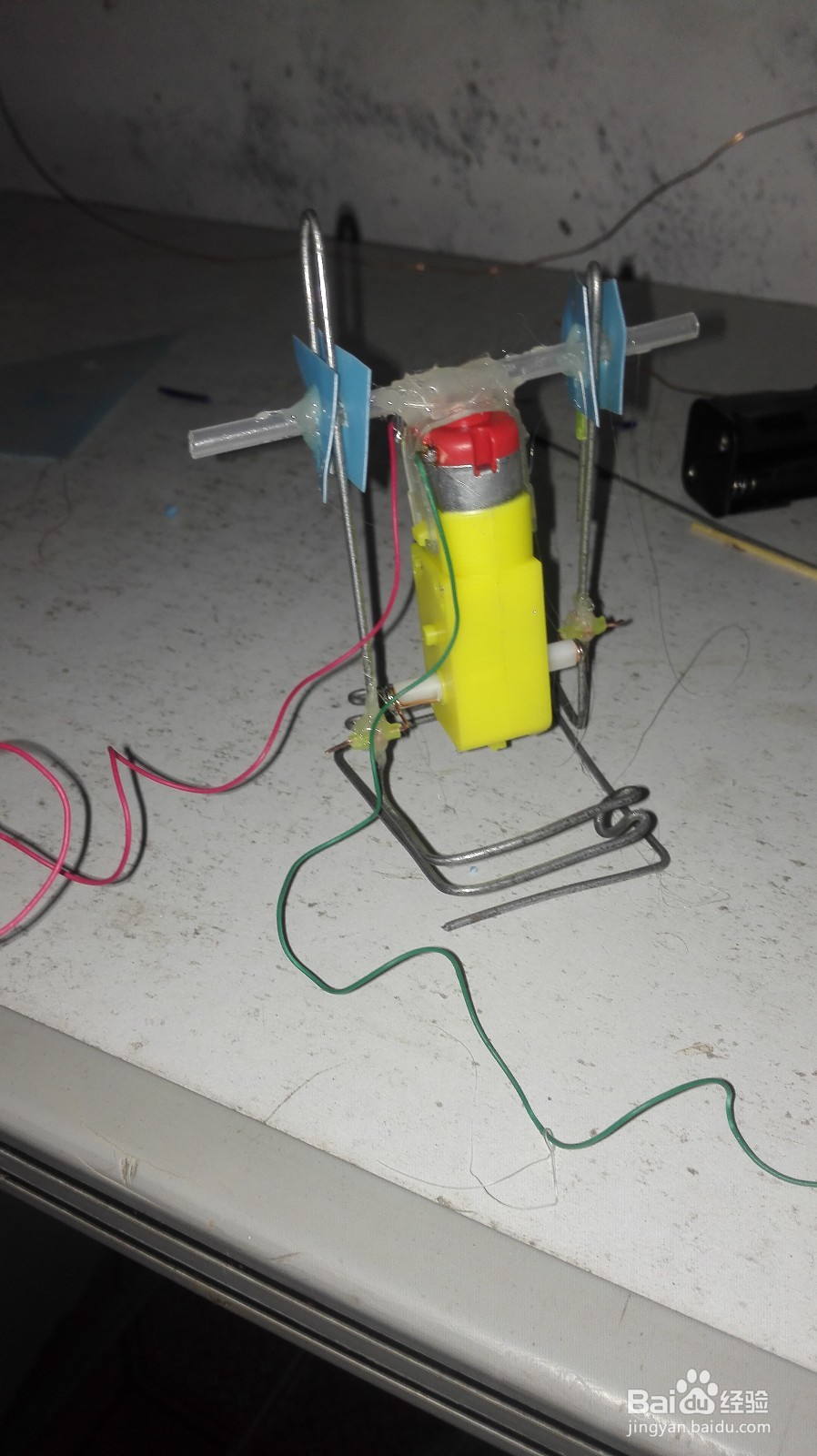
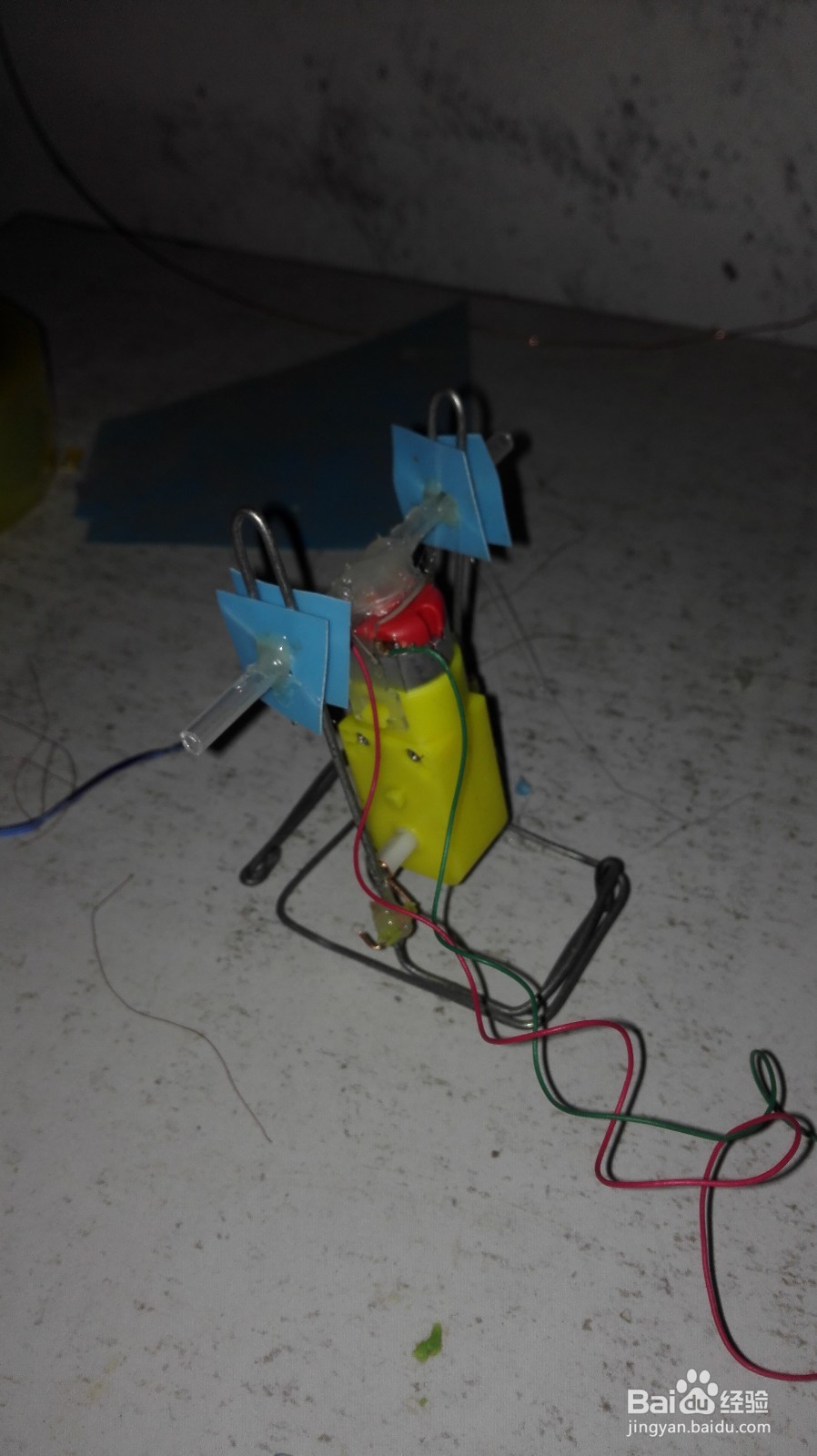
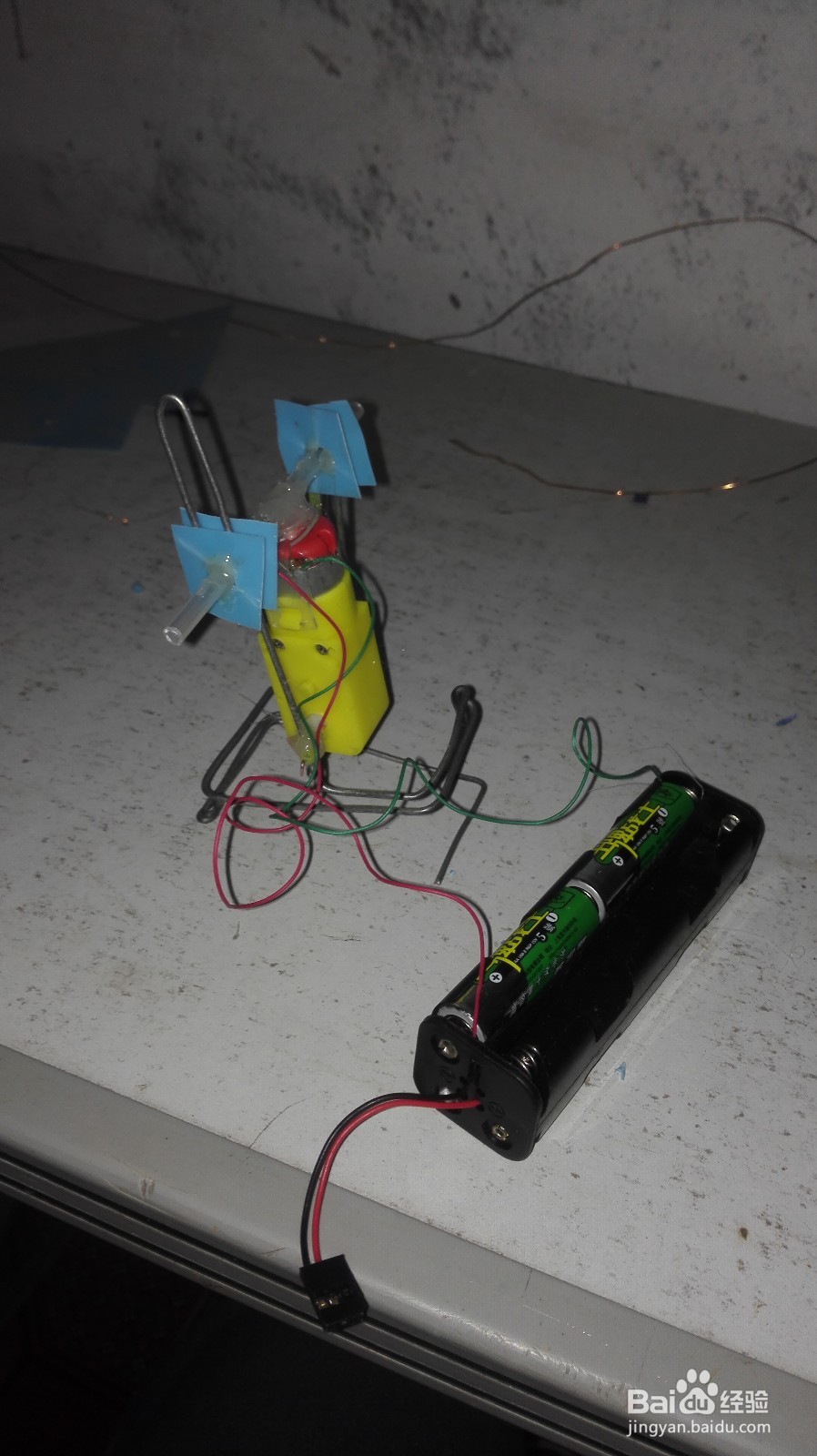
10/11最后,组装,将四个贴片套在笔芯上固定好机械脚,用热熔胶固定
 11/11
11/11通上3v直流电,机器人就可以迈腿行走了(如果制作图中有问题,欢迎留言)
 注意事项
注意事项制作过程需要耐心、细心
版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_315919.html