 订阅
订阅手部骨骼IK绑定2——拉伸
来源:网络收集 点击: 时间:2024-05-091:给模型arm创建一个图层;
如图所示;

 2/13
2/132:给控制器wrist_crv“添加属性”(在“通道盒——编辑”);
如图所示:
 3/13
3/133:使用“距离工具”(在“创建——测量工具”)创建距离节点;
(1)按“V”键,定位器locator1吸附在骨骼ctrl_shoulder
(2)按“V”键,定位器locator2吸附在骨骼ctrl_wrist;
如图所示:
 4/13
4/134:“点”约束;
(1)选骨骼ctrl_shoulder和定位器locator1;
(2)选IK:arm_IK和定位器locator2;
如图所示:
 5/13
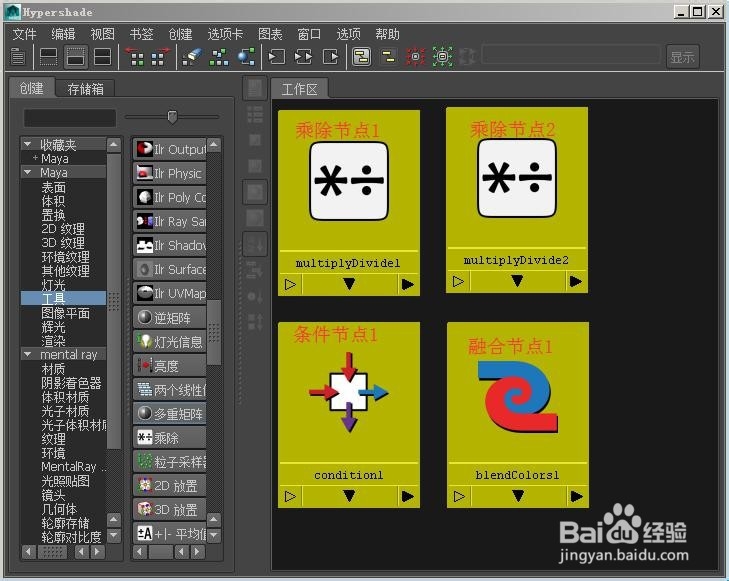
5/135:打开“材质编辑器”;
(1)创建2个“乘除”节点
(2)创建1个“条件”节点;
(3)创建1个“融合”节点;
如图所示:
 6/13
6/136:在“大纲视图”的“展示”;
《1》
(1)不勾选“仅DAG对象”;
(2)勾选“形状”;
《2》这样可以在大纲视图找到创建的“乘除,条件,融合”节点;
如图所示:

 7/13
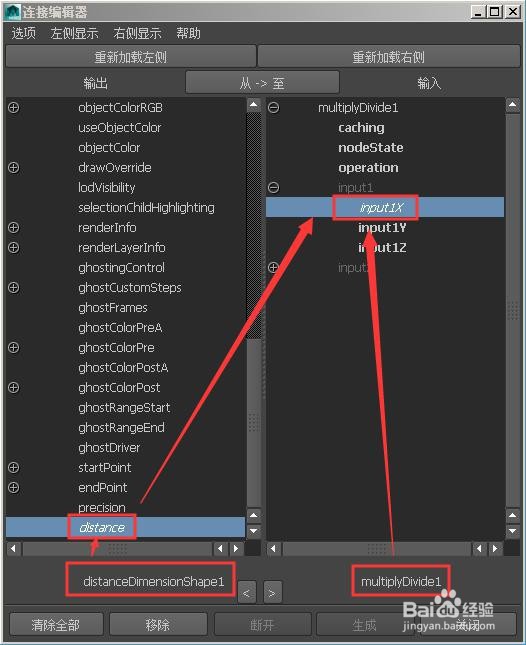
7/137:打开“连接编辑器”,连接节点;
(1)距离形状节点的distance连接乘除节点1的Input1X;
(2)打开乘除节点1的“属性编辑器”,编辑属性;
如图所示:
 8/13
8/138:打开“连接编辑器”,连接节点;
(1)乘除节点1的OutputX连接条件节点的first Term;
如图所示:
 9/13
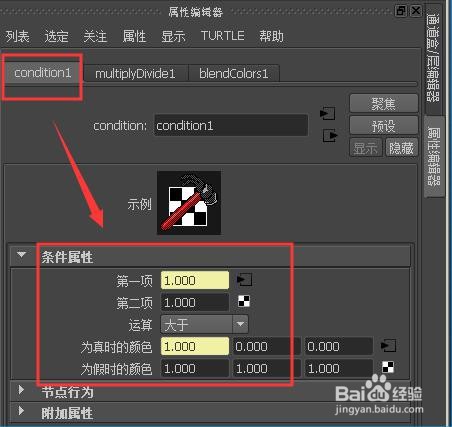
9/139:打开“连接编辑器”,连接节点;
(1)乘除节点1的OutputX连接融合节点的Color1R;
(2)融合节点的OutputR连接条件节点的color If TureR;
(3)打开条件节点和融合节点的“属性编辑器”,编辑属性;
如图所示:


 10/13
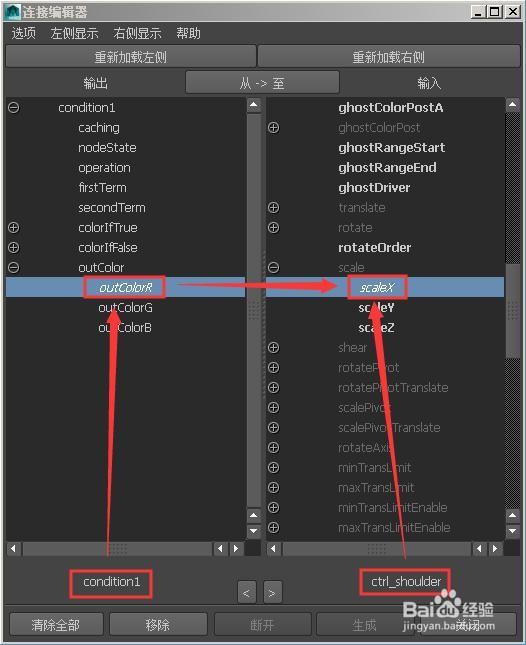
10/1310:打开“连接编辑器”,连接节点;
(1)条件节点的OutColorR连接骨骼ctrl_shoulder的scaleX;
(2)条件节点的OutColorR连接骨骼ctrl_elbow的scaleX;
如图所示:
 11/13
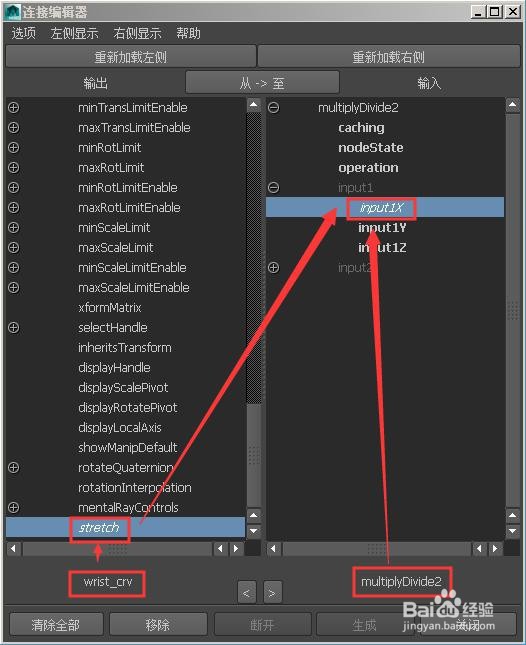
11/1311:打开“连接编辑器”,连接节点;
(1)控制器wrist_crv的stretch连接乘除节点2的Input1X;
(2)打开“乘除”节点2的“属性编辑器”,编辑属性;
如图所示:
 12/13
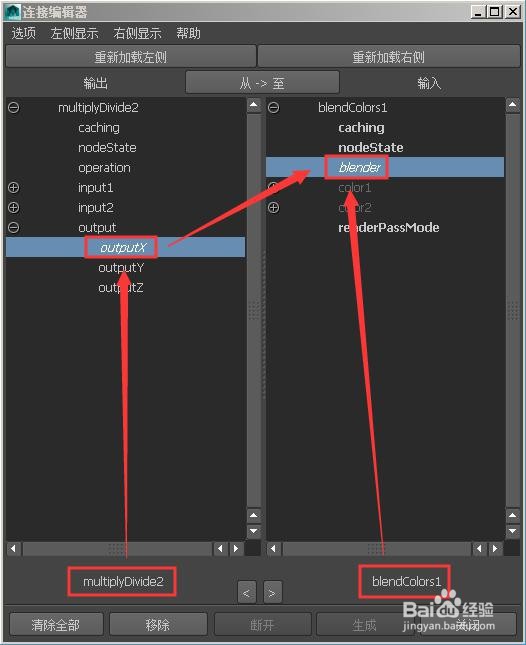
12/1312:打开“连接编辑器”,连接节点;
(1)乘除节点2的OutputX连接融合节点的blender;
如图所示:
 13/13
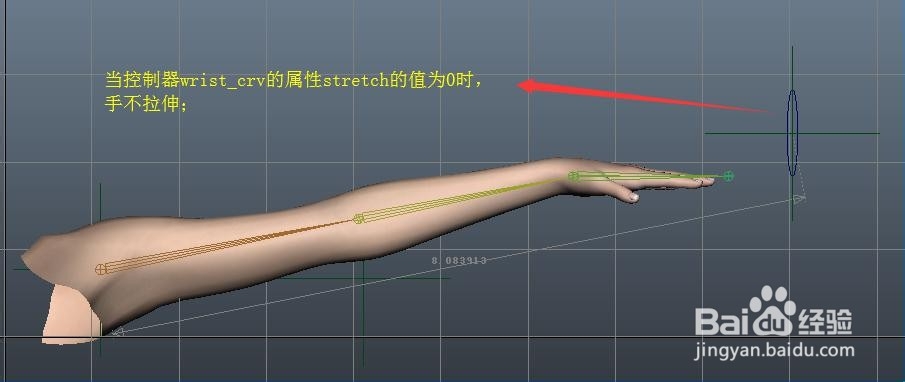
13/1313:调试控制器erist_crv的属性stretch的值测试手的拉伸;
(1)当stretch的值为0时,手不拉伸;
(2)当stretch的值为1时,手拉伸;
如图所示:
 MAYA绑定
MAYA绑定 版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_722156.html