 订阅
订阅制作爬墙机器人—萌版蜘蛛侠
来源:网络收集 点击: 时间:2024-05-20伺服电机连续运转
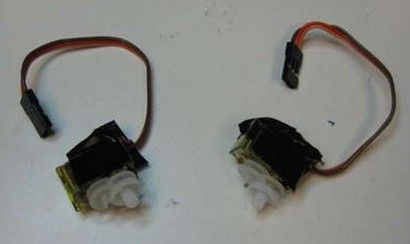
● 把固定它的壳子打开,对每个伺服机做简单修改就能得到我们需要的连续转动,先撬开壳子。
● 把妨碍转动的壳子剪掉,这样电位计就能一直获得连续信号。
● 这个黑色的部分是用来让它转了180度后停止的,看见没?两个黑色塑料小片儿。
● 取下齿轮。把黑色壳子上的线剪下,不要扔。
● 把挡着连续转动的小塑料片儿剪掉。
● 现在,电位计已被成功连接~,她一直采集连续信号。
● 从黑壳子上剪出红色,绿色和黄色的线(这个应当在上一步就做好了)。
● 绿色的线和黄色线之间焊个2.2K的电阻
● 在红色和黄色的线之间也焊个2.2K的电阻


 2/9
2/9● 在相同模拟信号下,伺服机的转向一般是相同的。他们对称安装在小W上,但是要让一个反向怎么办?在硬件和软件上都可以解决(我用硬件做的,因为我是代码懒人,摔!)。
● 剪下电机到电机板子上的红色和蓝色的线。
● 焊接红线到蓝线,然后蓝线到红线(其实就是像图上那样交叉一下)。
 3/9
3/9● 这步很容易嘿!尽可能温柔滴把线塞到伺服机壳子里面,然后把齿轮装配好。可是捏,我加了电阻后,以前的壳子就不合适了,所以我用绝缘胶布把他们缠在一块儿的。
 4/9
4/9● 怎么附上去呢?我用的热胶,其实任何粘性强的玩意儿都可以使,先剪两根1英寸长的硬线。
● 把每根线用热胶粘在伺服机顶部的齿轮里面。线要对半,露一半出来!
● 在每根线的末端粘3个磁盘。磁盘也必须是对准中心!
 5/9
5/9伺服机与单片机对接
● 我用PIN 9和 PIN 10来驱动电机。
● Pin 9 -伺服机1的橙线。
● Pin 10 -伺服机2的橙线
● Ground -伺服机1,2的黑线。
● VCC -伺服机1,2的红线。
 6/9
6/9接光敏电阻
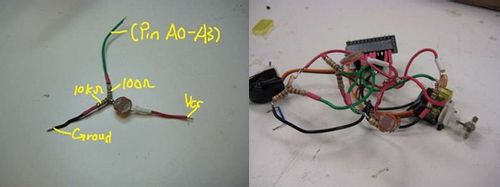
● 把每个光敏电阻(光传感器)都连到Arduino上,一共4个传感器,左、右、前、后。
● 每个光传感器的电路图下面有,传感器的一条线连接到VCC;另一条线连到10K和100欧姆的电阻上。10K电阻接地,100欧姆电阻连接输入端。每个传感器的输入(绿线)连到MINI上的模拟端口(A0,A1,A2,A3)。
● 我程序里是这样设置的:Analog 0 - 顶部的传感器;Analog 1 - 左边的传感器;Analog 2 - 前面的传感器;Analog 3 - 右边的传感器。
 7/9
7/9加上RGB LED灯
● 把每个光敏电阻(光传感器)都连到Arduino上,一共4个传感器,左、右、前、后。
● 你是不是想在每个端口和LED灯之间放个电阻(200 欧姆左右)?我没有酱紫,因为我的LED灯可以承受的电压比Arduino能提供的高得多,所以不会被烧。
 8/9
8/9安装电池
● 其实捏,能提供3—4V的电池都可以用,越轻越好。我使用了sparkfun锂电池。接地,然后高压直接接Arduino的VCC口。
上程序!!
● 这代码是关于2个伺服电机根据4个光传感器的输入值而进行驱动。根据模式,有几种运动方式。
红色最快,趋向物体(当光传感器检测到光被挡住时);
蓝色是中速,背向物体(背向黑色区域);
黄色最慢,检测到物体就停止。
● 小W和它的兄弟姐妹们通过磁铁轮子在墙上运动,可以左转右转和前行;根据不同模式可进行调速。
● 当顶部的传感器被遮住超过3秒,所有传感器自动校准。
9/9● 给小W穿件衣裳。但之前必须确定程序能跑,然后你能分得清哪个伺服机是左,哪个是右。
● 因为小W要垂直运动,衣裳越轻越好啊!我用的硬纸壳,其实报纸或者轻塑料都能使。
● 我把伺服机用热胶黏在硬纸盒里,传感器分布在前后左右,然后用硬纸壳加固。为了让热传感器和齿轮舒舒服服在里面呆着,我量体裁衣剪了些洞。小W的顶部其实就是一张纸!
这就做好了,赶紧试试吧。

 爬墙蜘蛛侠
爬墙蜘蛛侠 版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_810596.html