 订阅
订阅如何进行正运动技术运动控制器ZPLC程序开发?
来源:网络收集 点击: 时间:2024-05-22今天我们来学习一下运动控制器ZPLC程序开发。
ZPLC是Zmotion运动控制器支持的PLC语言,可以使用梯形图和语句表编程,与大多数PLC指令通用,熟悉PLC的客户可快速上手。
ZPLC支持与ZBasic进行联合编程,增加触点逻辑运算指令、浮点数触点比较指令、ZPLC调用ZBasic指令、注释指令//、其它指令等。
首先,在电脑里新建一个文件夹用来保存即将要建立的工程。打开ZDevelop编程软件,当前说明例程的ZDevelop软件版本为V3.00.02,更新软件版本请前往正运动官方网站下载。
1.新建项目菜单栏“文件”→“新建项目”。
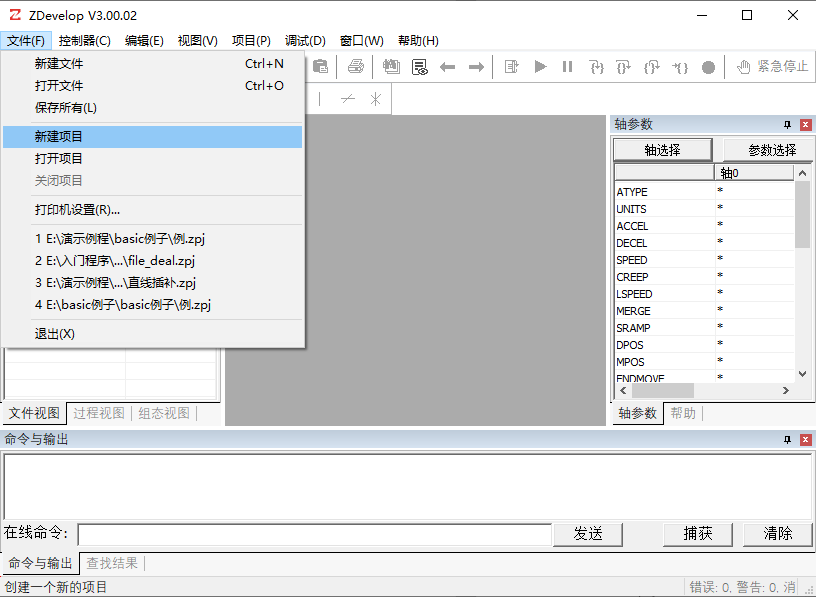
点击“新建项目”后弹出“另存为”界面,选择一个文件夹打开,输入文件名后保存项目,后缀为“.zpj”。
 2.新建文件
2.新建文件菜单栏“文件”→“新建文件”。

点击“新建文件”后,出现下图弹窗,选择新建的文件类型为PLC后确认。支持Basic/Plc/Hmi混合编程。
 3.设置文件自动运行
3.设置文件自动运行双击文件右边自动运行的位置,输入任务号“0”。
 4.编辑程序
4.编辑程序选中窗格,直接输入指令、操作数、操作数编号后确认。

指令格式正确成功输入梯形图,光标自动后移一格,若指令格式错误会弹窗提示。

或在梯形图工具栏里直接点击符号,弹出如下“PLC指令输入窗口”,输入指令、操作数、操作数编号后确认。
指令输入可选择直接输入、在下拉列表选择、或在左侧常用指令列表选择。

程序编写完成,点击保存文件按钮,新建的PLC文件会自动保存到项目zpj所在的文件下。
5.连接到控制器或仿真器在程序输入窗口编辑好程序,点击“控制器”→“连接”,没有控制器可选择连接到仿真器仿真运行,点击“连接”→“连接到仿真器”,本例程选择连接到仿真器运行,连接成功命令与输出窗口打印信息:Connected to Controller:ZMC4xx-Simu Version:4.80-20180104.。

选择串口或网口连接到控制器,选择匹配的串口参数或网口IP地址后,点击连接即可。
 6.下载程序
6.下载程序点击菜单栏按钮“↓ram”(下载到RAM)或按钮“↓rom”(下载到ROM),下载成功命令和输出窗口会有提示,同时程序下载到控制器并自动运行。

RAM下载掉电后程序不保存,ROM下载掉电后程序保存。下载到ROM的程序下次连接上控制器之后程序会自动按照任务号运行。
7.启动调试点击菜单栏“调试”→“启动/停止调试”,调用任务与监视窗口。
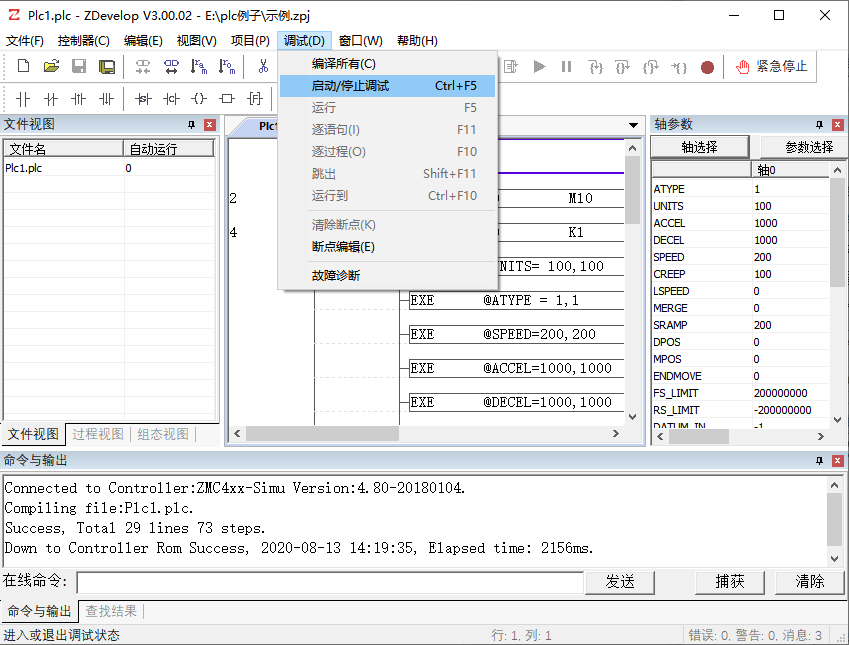
任务窗口用于查看多任务的运行状态以及任务行号,监视窗口用于监控轴参数、自定义变量、输入输出状态等信息。
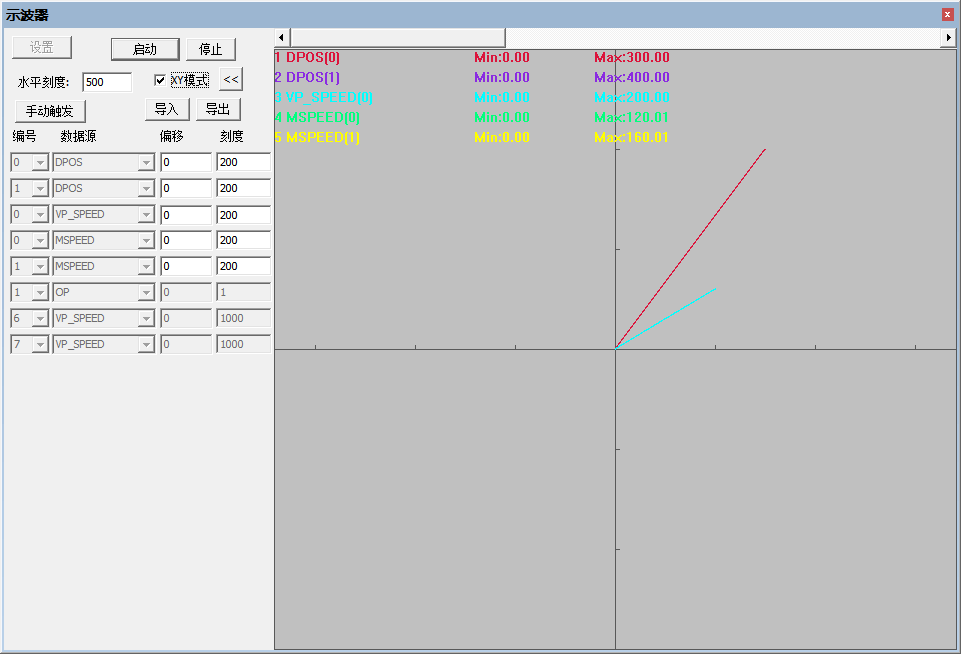
8.示波器采样在菜单栏“视图”→“示波器”打开示波器窗口,如下图:

打开“设置”选择要采集的通道数、深度、间隔等参数后确认,这里选择采样五个通道:
曲线0 轴0位置
曲线1 轴1位置
曲线2 轴0的插补合成速度
曲线3 轴0的分矢量速度
曲线4 轴1的分矢量速度
设置完成后,点击“启动”按钮。
闭合X0上升沿触点,传递轴0轴1的运动距离参数到数据寄存器中存储。
闭合X1触点,产生一个上升沿脉冲,M0导通并自锁,同时触发示波器采样指令和MOVE直线插补运动指令执行,得出波形如下图,X2触点用于快速停止轴运动。

XY模式下的轨迹如下:
在轴正在运行时按下X2按钮,得出波形如下图,插补运动按FASTDEC设置的参数快速停止轴。
 9.PLC梯形图演示程序
9.PLC梯形图演示程序
对应语句表程序:
//轴参数初始化
LD M8002
ZRST M0 M10
LD M8002
BASE k0 k1
EXE @UNITS= 100,100
EXE @ATYPE = 1,1
EXE @SPEED=200,200
EXE @ACCEL=1000,1000
EXE @DECEL=1000,1000
EXE @SRAMP=200,200
EXE @DPOS=0,0
EXE @MPOS=0,0
EXE @FASTDEC=20000,20000
//直线插补运动
LDP X0
DEMOV K300 D0
DEMOV K400 D2
// IN1上升沿启动运行,IN2按下运动快速停止
LDP X1
OR M0
ANI M1
ANI X2
OUT M0
EXEP @TRIGGER
MOVE D0 D2
LD M8100
PLS M1
END
版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_822665.html