 订阅
订阅Arduino 互动跑马灯
来源:网络收集 点击: 时间:2024-06-19准备实验需要用到的硬件,如图所示:
 2/9
2/9如下图所示进行硬件的连接,此步我们先不连接任何其他元件,只需将Arduino UNO控制器连接到电脑
 3/9
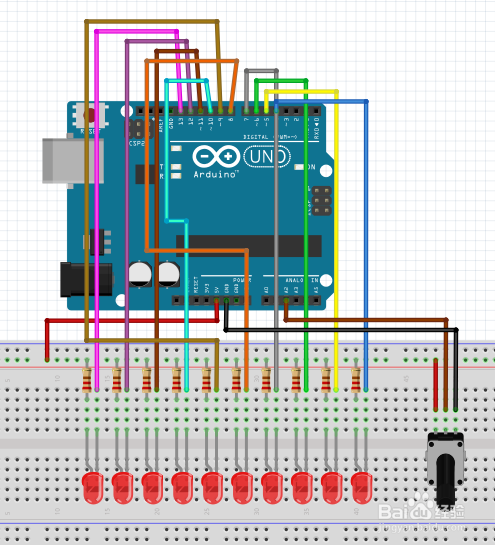
3/9如下图所示,将下列程序复制到Arduino IDE中或者可以直接在最后一步中提供的百度网盘地址中直接下载代码和 Fritzing 电路图
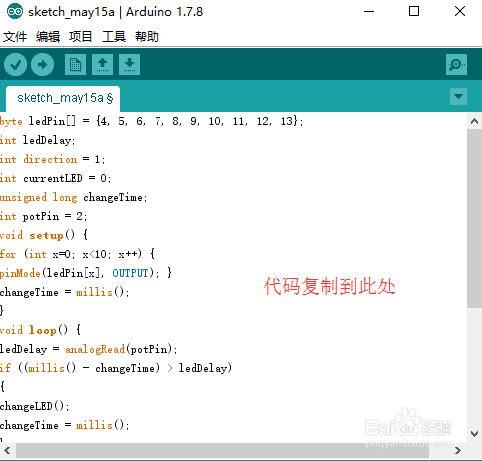 4/9
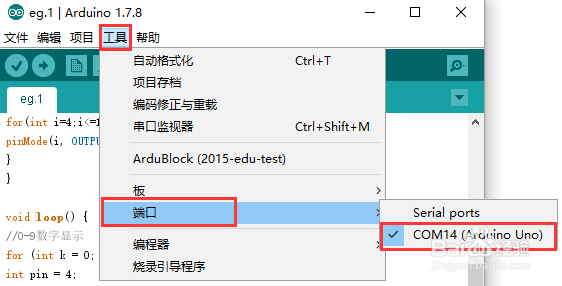
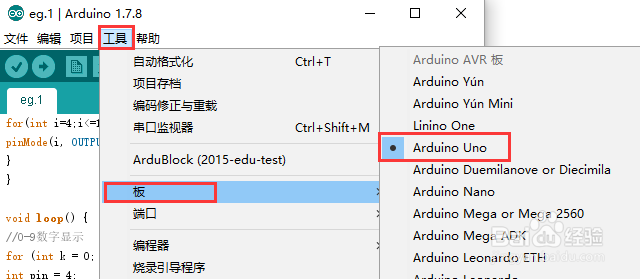
4/9如图所示,选择正确的板卡型号和端口,将程序上传到控制器中。
 5/9
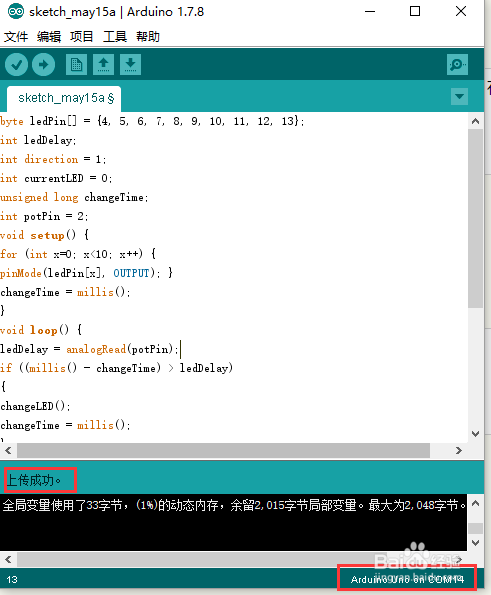
5/9如图所示,程序上传无误的情况下 Arduino IDE 软件会显示如下结果,在上传过程中,Arduino 控制器板载的 TX RX 灯会频闪
 6/9
6/9按照下图中的电路,进行实验硬件的连接
 7/9
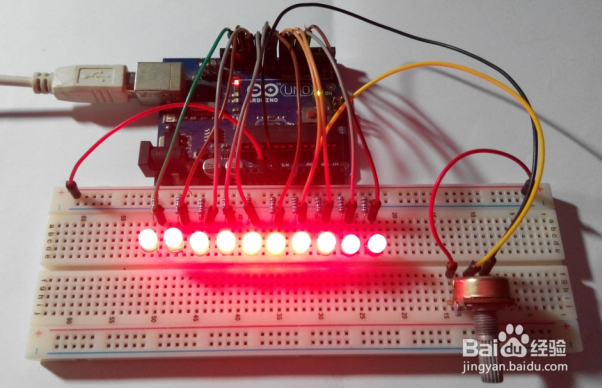
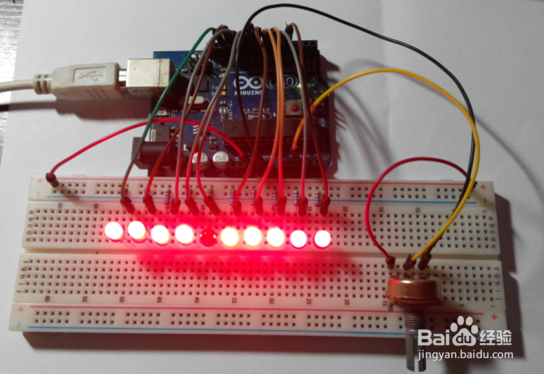
7/9实验效果如图所示,当旋转角度电位计向逆时针旋转时,LED 跑马灯速度降低;当旋转角度电位计顺时针旋转时,LED 跑马灯速度加快,跑马灯最快速度可以达到人眼观察为 LED 全部亮起。
 8/9
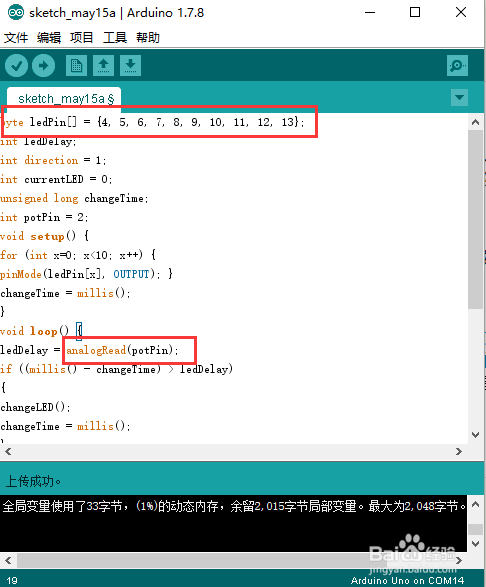
8/9代码回顾:
(1)byte ledPin = {4, 5, 6, 7, 8, 9, 10, 11, 12, 13};
这是定义一个 byte(位) 类型的数组变量,数组是一个变量的集合,可以通过索引号来使用数组中的元素,注意,数组是从 0 开始索引的,所以数组中第一个元素的索引是 0 而不是 1
(2)int potPin = 2; 此句是给电位计引脚声明一个变量
变阻器连接到模拟引脚2上,为了从模拟引脚读数值,需要使用如下函数,来读取模拟量的值。
ledDelay = analogRead(potPin);
Arduino UNO控制器有6个模拟输入引脚,每个引脚带有一个10位模数转换器。这就说明模拟引脚可以读取 0 到 5V 之间的电压,用 0 到 1023 之间的整数代表。这个转换的结果是每个分度表示 5V/1024 电压,即每个分度是
0.0049V(4.9mV)
以上代码在如图所示的位置
 9/9
9/9为了方便大家实验,防止在复制代码的时候出现错误,特将代码和电路图
Fritzing源文件上传至网盘供大家下载学习。下载地址:
http://pan.baidu.com/s/1bpK8MJH,打开链接后,如图所示,点击下载即可
 注意事项
注意事项发光二极管的正极通过电阻连接到 UNO 控制器的正极,负极连接 UNO 控制器的负极
ARDUINO跑马灯霹雳游侠ARDUINO控制器ARDUINO教程版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_909096.html