 订阅
订阅UG10.0两垂直方向位移运动仿真
来源:网络收集 点击: 时间:2024-07-19【导读】:
UG10.0运动仿真中简单的两垂直方向(X-Y向位移)仿真。第一次写经验,在网上找了很多这方面的方法,没有一个说清楚的,摸索之后的经验与诸位分享,希望有所帮助工具/原料moreug10.0方法/步骤1/6分步阅读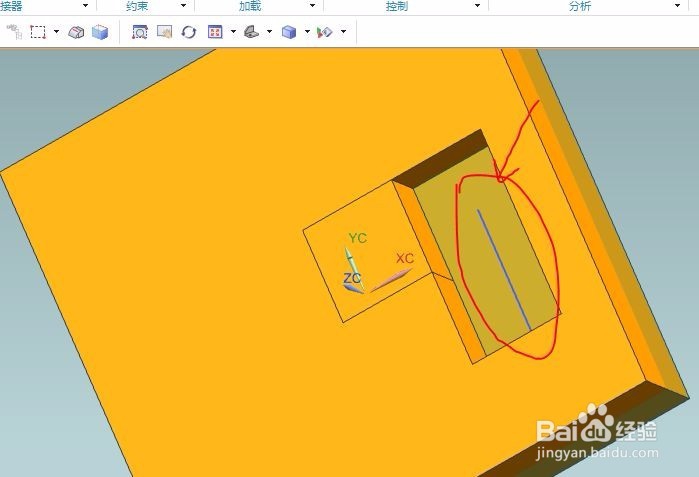 2/6
2/6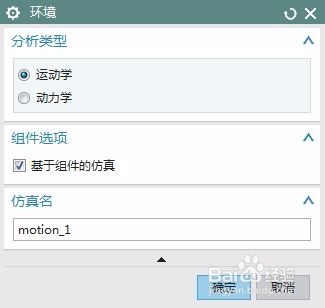 3/6
3/6 4/6
4/6
 5/6
5/6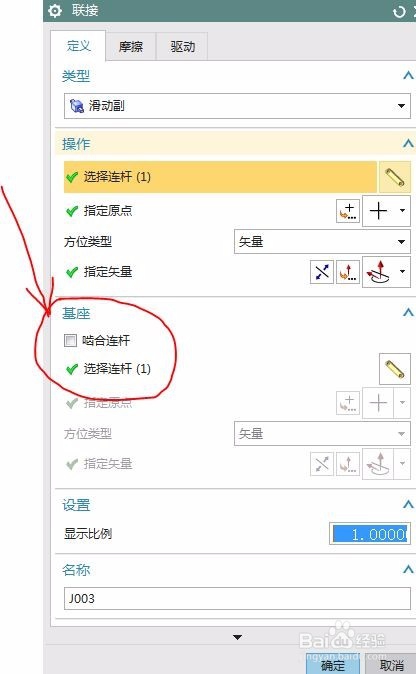
 6/6
6/6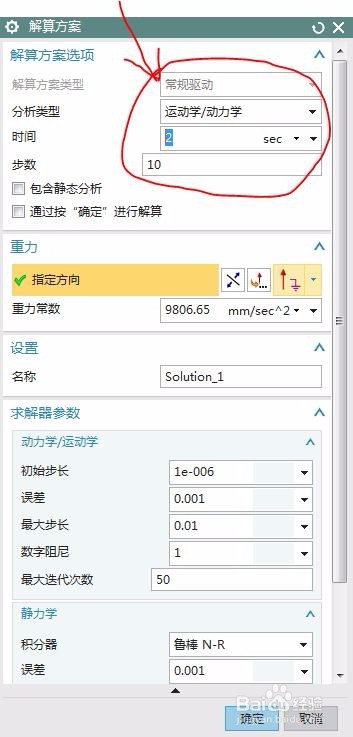 注意事项
注意事项
首先建立简单模型。在这里画了一个大基座,一个方块,和一条直线。此直线将作为啮合连杆(装配过程不需要任何约束)
2/6环境设置为如下图
3/6设置3个连杆,此处连杆1为大基座且为 固定连杆;连杆2为方块;连杆3为直线。三者均不用设置质量等
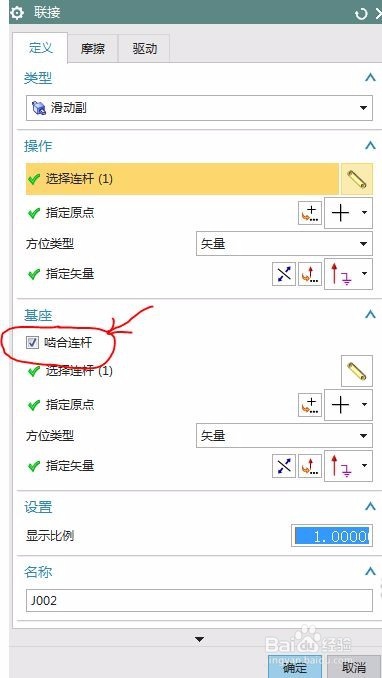
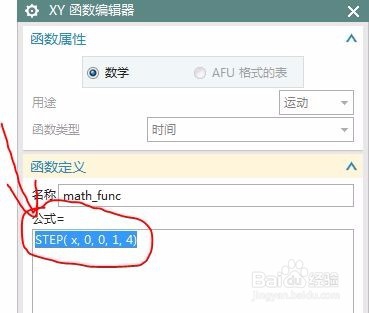
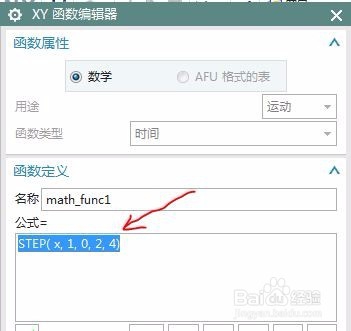
4/6运动副J001在创建基座为固定连杆后就会自动生成无需设置。设置运动副J002为滑动副,操作连杆为方块,基座勾选啮合连杆为直线,二者原点和矢量方向一致。然后设置驱动,此处驱动设置为step函数(根据本运动仿真)
5/6设置运动副J003为滑动副,此时操作连杆为直线,原点为上端点,矢量沿直线向下。基座连杆此时不勾选啮合连杆,选大基座。设置驱动,此处驱动设置为step函数(根据本运动仿真)
6/6最后设置结算方案,根据本运动仿真时间为2s,步数不需要太多。确定后求解,观看动画即可看到方块沿垂直槽进行运动
注意事项至于啮合连杆与前面的操作连杆是否一定要同原点同矢量还未来得及验证,若有不同处理方法欢迎交流
UG版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_972756.html
上一篇:由于家庭贫困学生生活补助申请表·怎么填
下一篇:ios16怎么隐藏应用