 订阅
订阅什么是Choregraphe指令盒?
来源:网络收集 点击: 时间:2024-07-20Choregraphe的工作原理基于指令盒。实际上,您在Choregraphe里创建行为所需的第一要素就是指令盒。首先,让我们来看看什么是指令盒。以“动作”指令盒为例:
 2/7
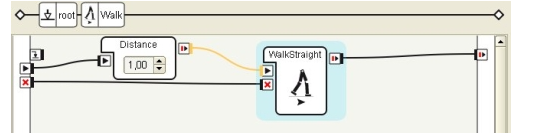
2/7一个指令盒有输入点(左侧)和输出点(右侧),用于把不同的指令盒相互连在一起。事实上,要激活一个指令盒的输入点,必须把它连接至一个行为的输入点(流程图屏幕左上方)或是另一个指令盒的输出点。实例见下图:
 3/7
3/7指令盒之间的连接基于事件。一个简单的事件信号会从一个指令盒传送到另一个指令盒。这个信号还可以承载信息(例如字符串、数字、数组等)。 这就是为什么有时无法连接两个指令盒:一个指令盒输出点送出的信息必须被另一个指令盒的输入点读懂。否则,这两个指令盒就无法连接。稍后,您会了解到Choregraphe中的各种信号。
 4/7
4/7我们现在要介绍Choregraphe中三种不同的指令盒。
 5/7
5/7脚本指令盒
将Switch LEDs 指令盒拖放至流程图,然后双击,打开“脚本编辑器”。
脚本定义的是何时加载包含指令盒的流程图,以及何时激活指令盒的一个输入点。可以使用Python和Urbi语言编写脚本,指令盒可以使用NAOqi的任何功能进行交流(与其它模块交流,通过ALMemory记录等)。
 6/7
6/7流程图指令盒
使用以上介绍的基础指令盒,您可以构建较为复杂的指令盒。例如,一个指令盒中可以包含其它指令盒,这些指示盒里又包含有其它相互连接的指示盒。这对于构建和组织行为流程图非常有用。
您可以将若干相互连接的指令盒合并到同一个指令盒中,以获得一个可读性更强的流程图。
 7/7
7/7结合时间轴和流程图指令盒
在指令盒中,您可创建一个时间轴来定义动作。使用可储存关节值及数值间插值(线性、样条曲线等)的关键帧,可以在Choregraphe里快速编写动作。有关时间轴的介绍详见使用指导“从零开始创建动作”。
一个指令盒里可包含带有两种不同关键帧的时间轴:
动作关键帧:包含关节值以及上一个动作关键帧的插值。
行为关键帧:包含一个流程图,该流程图会一直运行,直到遇到下一个行为关键帧为止。
 注意事项
注意事项得到大家的投票,是我努力的动力,请点击文章末尾的“投票”和“收藏”按钮支持我,并关注 疾风kang,及时了解我的最新经验分享O(∩_∩)O~
如果对您有帮助请浏览 疾风kang 更多精品文章,并请点击右下角的“分享”按钮,分享给更多的朋友。
硬件机器人版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_978583.html