 订阅
订阅ArcGIS教程:影响路径距离(垂直系数)
来源:网络收集 点击: 时间:2024-07-25垂直系数
垂直系数 (VF) 从影响移动的垂直因素的角度出发,确定从一个像元移动至另一个像元的困难。
确定从一个像元行进到另一个像元时遇到的 VF 与确定水平系数相似,不同之处在于计算 VF 时不像计算 HF 时那样将连接分为两段。这是因为在两个像元中心之间仅有一个斜率。因此,仅存在一个垂直相对移动角度 (VRMA)。
要确定从一个像元移到下一个像元的 VF,需根据输入垂直系数栅格中定义的值计算“起始”像元和“目标”像元之间的斜率。结果斜率为 VRMA,将在垂直系数图上将其绘出以确定垂直系数值,该值将用于计算像元间移动的路径距离。此垂直系数确定自起始像元中心到目标像元中心的垂直系数。垂直系数越大,移动的难度也就越大。
垂直相对移动角度是“起始”像元与“目标”像元形成的斜率的角度。斜率使用勾股定理公式垂直增量/水平增量进行计算。确定斜率所必需的三角形底边通过像元大小得出。高度通过从“目标”像元值减去“起始”像元值来确定。生成的角度为 VRMA。
VRMA 以度为单位进行指定。VRMA 的值范围为 -90 到 +90 度,这样对正负斜率都做出了补偿。随后将在指定的垂直系数图上绘制 VRMA 值,从而获得计算到达“目标”像元的成本时使用的垂直系数。得出的 VRMA 为 0.25 度。
例如,下图显示了 LINEAR 类型图中 VF 和 VRMA 的关系:
 2/3
2/3垂直系数关键字
定义确定 VF 时使用的垂直系数图所涉及的步骤与定义水平系数图相同。可以从随软件提供的图表列表中选择图表,也可以使用 ASCII 文件创建自定义图表。随软件提供的垂直系数图包括以下类型:
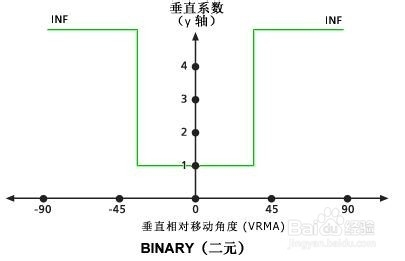
BINARY
当 VRMA 大于切削角上限且小于切削角下限时,在两个像元之间移动的 VF 设置为与零系数相关联的值。如果VRMA 大于切削角,则 VF 设置为无穷大。如果未进行任何指定,则默认的切削角为 30 度。
LINEAR
VF 由 VRMA-VF 坐标系中的一条直线确定。这条线在 y 轴(表示 VF 系数)上与零系数相关联的值处进行截取。线的斜率可以使用 SLOPE 修饰属性进行指定。如果未确定斜率,则默认值为 1/90(指定为 0.01111)。默认的切削角下限为 -90 度,而默认的切削角上限为 90 度。
SYM_LINEAR
SYM_LINEAR 由两个与 VRMA 相关的线性函数组成,这两个函数关于 VF (y) 轴对称。两条线都在与零系数相关联的 VF 值处截取 y 轴。使用 SLOPE 垂直系数修饰属性相对于正 VRMA 定义线的斜率,然后将针对负 VRMA 生成一个镜像。默认斜率为 1/90(指定为 0.01111)。默认的切削角下限为 -90,而默认的切削角上限为 90。
INVERSE_LINEAR
VF 由 VRMA-VF 坐标系中的一条直线的逆向值确定。这条线在 y 轴(表示 VF 系数)上与零系数相关联的值处进行截取。线的斜率可以确定(如果使用 SLOPE 修饰属性指定)。如果未确定斜率,则默认值为 -1/45(指定为.02222)。默认的切削角下限为 -45 度,而默认的切削角上限为 45 度。
SYM_INVERSE_LINEAR
顾名思义,SYM_INVERSE_LINEAR 与 SYM_LINEAR 垂直系数关键字正相反。它由两个与 VRMA 相关的线性函数组成,这两个函数关于 VF (y) 轴相对称。两条线都在 VF 值为 1 处截取 y 轴。使用 SLOPE 垂直系数修饰属性相对于与正 VRMA 定义线的斜率,然后将针对负 VRMA 生成一个镜像。默认斜率为 -1/45(指定为 .02222)。默认的切削角下限为 -45,而默认的切削角上限为 45。
COS
VF 由 VRMA 的余弦函数确定。默认的切削角下限为 -90 度,而默认的切削角上限为 90 度。默认的 COSPOWER为 1.0。
SEC
VF 由 VRMA 的正割函数确定。默认的切削角下限为 -90 度,而默认的切削角上限为 90 度。默认的 SECPOWER为 1.0。
COS_SEC
当 VRMA 度数为负值时,VF 由 VRMA 的余弦函数确定。如 VRMA 度数为正值,VF 则由 VRMA 的正割函数确定。默认的切削角下限为 -90 度,而默认的切削角上限为 90 度。默认的 COSPOWER 和 SECPOWER 均为 1.0。
SEC_COS
当 VRMA 度数为负值时,VF 由 VRMA 的正割函数确定。如 VRMA 度数为正值,VF 则由 VRMA 的余弦函数确定。默认的切削角下限为 -90 度,而默认的切削角上限为 90 度。默认的 COSPOWER 和 SECPOWER 均为 1.0。
TABLE
表是一个 ASCII 文件,每行对应两列。这与水平系数图中的 TABLE 选项类似。
第一列以度为单位标识 VRMA,第二列为 VF。每行指定一个点。两个连续的点生成 VRMA-VF 坐标系中的一条线段。角度必须按升序输入。对于所有小于第一个(最低)输入值或大于最后一个(最大)输入值的 VRMA 角度,其 VF系数将设置为无穷大。在 ASCII 表中,无穷大的 VF 表示为 -1。
垂直系数 ASCII 表示例:
0 1.40
10 2.43
20 2.30
30 3.44
40 1.25
50 1.02
60 0.90
70 0.86
80 0.25
90 0.78
100 1.49
110 2.35
120 3.32
130 2.39
140 3.18
150 2.13
160 1.89
170 1.20
180 2.034
 3/3
3/3垂直系数修饰属性
与 HRMA 图一样,VRMA 图中的字符可由修饰属性进行进一步的控制,从而细化垂直系数。可能会存在角度阈值,如果 VRMA 超过了此角度,成本会过高而使其成为行进的障碍。此阈值称为交角。当 VRMA 超出此值时,VF 会指定为无穷大。
水平系数图仅有一个交角,而垂直系数图与此相反,它具有最大和最小两个交角。
可为每个函数指定交角,可增大三角曲线的幂,可通过零系数更改非三角函数的 y 轴截距,还可以定义线性函数中线的斜率。
LCUTANGLE
定义阈值下限的 VRMA 度数,如果低于(小于)该值,将不会考虑指定的垂直系数关键字,而将 VF 设置为无穷大。
HCUTANGLE
定义阀值上限的 VRMA 度数,如果高于(大于)该值,将不会考虑指定的垂直系数关键字,而将 VF 设置为无穷大。
SLOPE
为 LINEAR、INVERSE_LINEAR、SYM_LINEAR 和 SYM_INVERSE_LINEAR 关键字确定 VRMA-VF 坐标系中直线的斜率。斜率被指定为垂直增量/水平增量(例如,30 度斜率为 1/30,指定为 0.03333)。有关斜率为 1/90 的线性函数的示例,请参见 LINEAR VRMA 图。
COSPOWER
COS VRMA 函数中的值将增加到的幂。VF 由以下方程确定:
VF = cos(VRMA)power
SECPOWER
SEC VRMA 函数中的值将增加到的幂。VF 由以下方程确定:
VF = sec(VRMA)power
TABLE_NAME
识别将与 TABLE 垂直系数关键字一同使用的 ASCII 文件的名称。
 教程
教程 版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_1004145.html