 订阅
订阅超高性价比运动控制卡快速入门
来源:网络收集 点击: 时间:2024-04-03a.ECI1408控制卡本体支持4轴,通过连扩展模块,最多支持6轴运动控制。
b.脉冲输出模式:方向/脉冲或双脉冲。
c.支持手轮输入模式。
d.每轴最大输出脉冲频率5MHz
e.通过CAN总线,最多可扩展到512个隔离输入或输出口。
f.轴正负限位信号口/原点信号口可以随意配置为任何输入口,也可以采用出厂默认配置的信号。
g.输出口最大输出电流可达300mA,可直接驱动部分电磁阀。
h.支持最多达6轴直线插补、任意圆弧插补、螺旋插补,电子凸轮、电子齿轮、位置锁存、同步跟随、虚拟轴等功能。
i.多种程序加密手段,保护客户的知识产权。
二、通讯接口1/2运动控制器上带的通讯接口:232 接口、EtherNET网口、CAN接口。
板上自带 36个通用输入口IN,12个通用输出口OUT,通过CAN总线可以连接各个扩展模块,在控制器自身IO点数不够用的时候,扩展输入输出点数或脉冲轴。
 2/2
2/2ECI网络运动控制卡支持以太网、232通讯接口和电脑相连,接收电脑的指令运行。
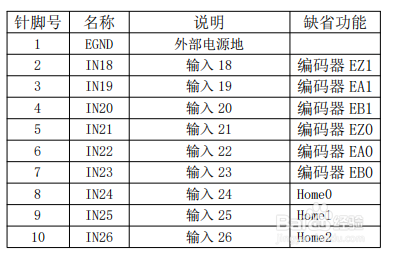
通用输入口IN配置为编码器反馈:
例如:IN18-20配置一个编码器,对应的编码器轴号是1,意味着编码器输入信号将在AXIS1上,如果将轴1的走类型配置为3或6,ATYPE(1)=3/6,此时做编码器输入,ATYPE(1)=0,则为通用输入口。
原点、正负限位信号已经做好了定义,例如,下图24-26已经配置为轴0-2的原点输入信号,用户也可以使用DATUM_IN映射原点输入信号指令重新定义原点信号。

 三、开发环境1/2
三、开发环境1/2ECI1408控制卡的应用程序建议使用VC,VB,VS,C++Builder,C#,等软件来开发,控制器支持windows,linux,Mac,Android,wince各种操作系统下的开发,提供vc,c#,vb.net,labview等各种环境的dll库。上位机软件编程参考《ZMotion PC函数库编程手册》。
 2/2
2/2使用PC上位机软件开发的程序无法下载到控制器,通过dll动态库连接到控制器。调试时可以把ZDevelop软件同时连接到控制器,方便观察程序运行情况。
ECI1408控制卡也通过ZDevelop开发环境来调试,不过程序空间较小,不能写过多的代码。
ZDevelop是一个很方便的编程、编译和调试环境。ZDevelop可以通过串口、485、USB或以太网与控制器建立连接。
四、控制器使用1/20控制器使用基础流程:
第一步:硬件接线
参考控制器系统架构图,接入主电源(控制器采用24V直流电源供电),驱动设备,IO设备,触摸屏、扩展模块等。
第二步:系统配置
设置伺服驱动器的参数,配置PC与控制器连接所需的串口或网口参数等。
第三步:连接控制器
采用串口或网口连接PC与控制器,建立通讯连接。
第四步:编程开发
选择一种开发方式,本例子采用VS平台的C++开发。
第五步:程序调试
调试程序,通过动态库连接到控制器使用,控制器收到命令后执行运动控制,没有控制器的场合连接到仿真器调试。
第六步:运行程序
运行程序观察效果能否满足需求。
 2/20
2/20工具材料准备:
(1)硬件
A.ECI1408控制器一台。
B驱动器+电机一套
C.电脑一台。
D.带屏蔽层网线一根。
E.24V直流电源一个。
F.接线端子与连接线若干。
(2)软件
A.安装下载VS软件
所需的库文件联系正运动技术获取。
 3/20
3/20VS下的C++开发
主要介绍应用C++开发一个多段连续插补的运动控制应用。
我们主要从新建MFC项目,添加函数库讲起,再了解PC函数用,最后通过项目实战——连续插补运动例程讲解,来让大家熟悉它的项目开发。
A.新建MFC项目,添加函数库。
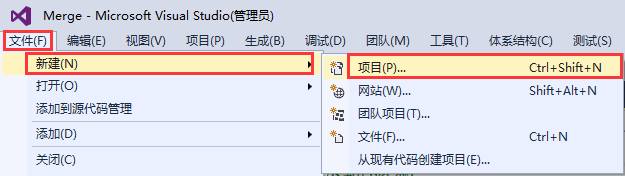
a.在VS2015菜单“文件”→“新建”→ “项目”,启动创建项目向导。
 4/20
4/20接上:b.选择开发语言为“Visual C++”和程序类型“MFC应用程序”。
 5/20
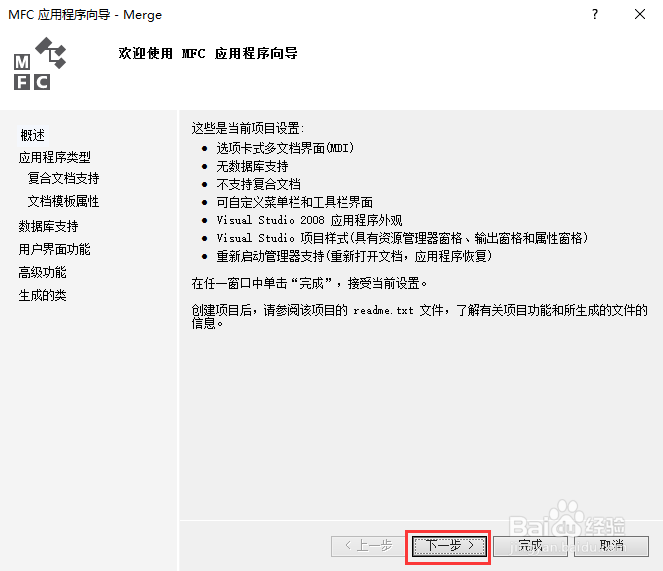
5/20接上:c.点击下一步即可。
 6/20
6/20接上:d.选择类型为“基于对话框”,下一步或者完成。
下一步则往后继续配置,完成就直接完成即可。这里就不需要再配置了,无关紧要的,只要这个类型选好就行,其他的可以在项目中编辑。
 7/20
7/20接上:e.找到厂家提供的光盘资料,路径如下(64位库为例):
1)进入光盘资料找到PC函数文件夹。
 8/20
8/20接上:2)选择函数库2.1。
 9/20
9/20接上:3)Windows平台。
 10/20
10/20接上:4)根据需要选择对应的函数库这里选择64位库。
 11/20
11/20接上:5)解压C++的压缩包,里面有C++对应的函数库。
 12/20
12/20接上:6)函数库具体路径如下。
 13/20
13/20接上:f.将厂商提供的C++的库文件和相关头文件复制到新建的项目里面。
 14/20
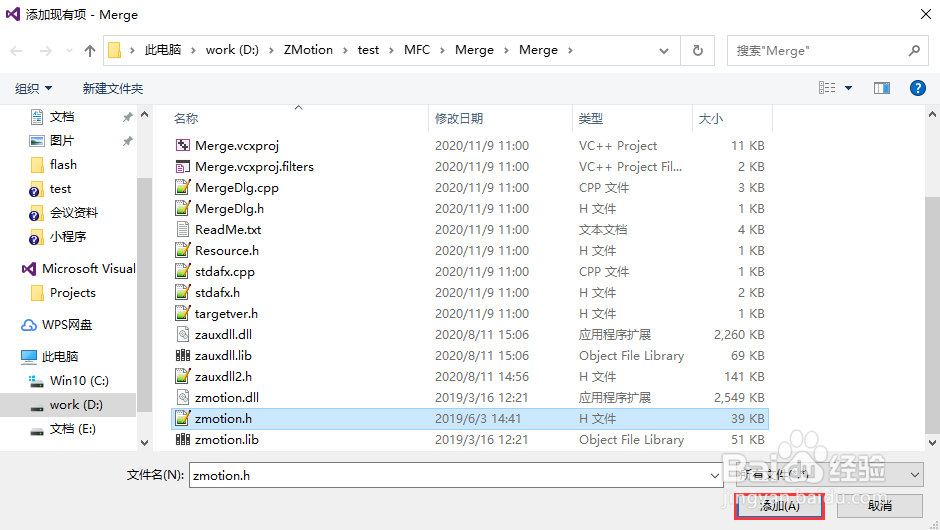
14/20接上:g.在项目中添加静态库和相关头文件。
静态库:zauxdll.lib, zmotion.lib
相关头文件:zauxdll2.h, zmotion.h
1)先右击头文件,接着依次选择:“添加”→“现有项”。
 15/20
15/20接上:2)在弹出的窗口中依次添加静态库和相关头文件。
 16/20
16/20接上:3)声明用到的头文件和定义控制器连接句柄。至此项目新建完成。
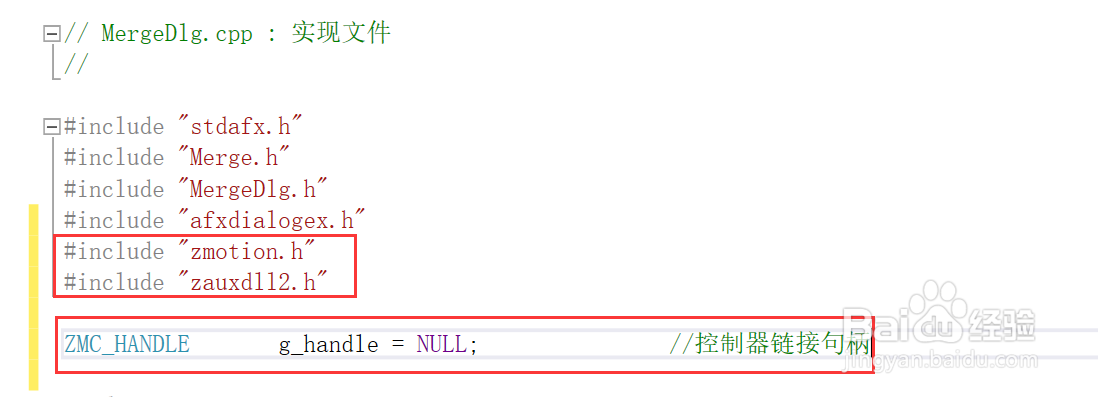 17/20
17/20B.查看PC函数手册,了解PC函数用法。
a.PC函数手册也在光盘资料里面,具体路径如下:
 18/20
18/20接上:b. PC编程,一般先根据控制器连接方式选择对应的连接函数连接控制器,返回控制器句柄。接着用返回的控制器句柄,实现对控制器的控制。
c.比如通过网口连接控制器,先使用ZAux_OpenEth()链接控制器,获取控制器句柄handle。

 19/20
19/20接上:d.通过获取到的控制器句柄handle,对控制器进行单轴运动控制。
 20/20
20/20接上:e.通过获取到的控制器句柄handle,对控制器进行多轴运动控制。
//多轴运动
int axislist = { 0,1,2,3 }; //运动BASE轴列表
float dislist = { 100,100,100,100 }; //运动距离列表
ZAux_Direct_Move(g_handle, 4, axislist, dislist); //多轴运动
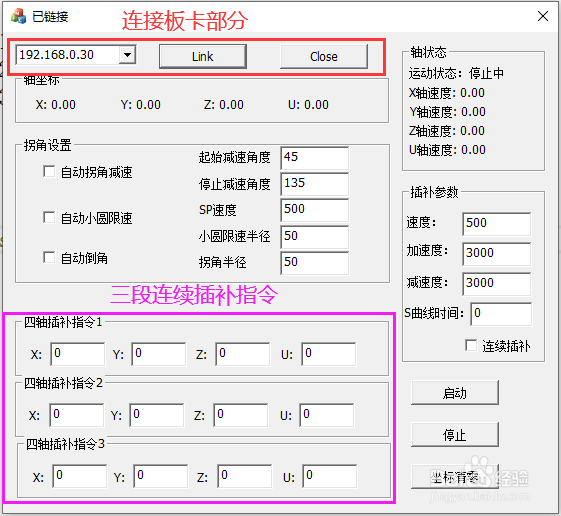
 五、项目实战之连续插补运动例程讲解。1/11
五、项目实战之连续插补运动例程讲解。1/11例程以建立板卡的连接,执行3段连续轨迹的加工为目标。
 2/11
2/11例程简易流程图。
//相关函数ZAux_OpenEth(IP_buffer, g_handle);//连接控制器ZAux_Direct_GetAllAxisPara(g_handle, DPOS, 4, showpos);//获取当前轴位
ZAux_Direct_GetAllAxisPara(g_handle, MSPEED, 4, mspeed);//更新轴速度ZAux_Direct_Single_Cancel(g_handle, 0, 2); //停止主轴运动ZAux_Direct_Move(g_handle, 4, axislist, dislist1);//第1段多轴插补指令
ZAux_Direct_Move(g_handle, 4, axislist, dislist2);//第2段多轴插补指令
ZAux_Direct_Move(g_handle, 4, axislist, dislist3);//第3段多轴插补指令ZAux_Close(g_handle);//断开连接
 3/11
3/11通过网口连接控制器,获取控制器连接句柄。
//Link按钮事件处理函数
voidCMergeDlg::OnBnClickedButtonLink()
{
charbuffer;
int32iresult;
//如果之前有连接控制器着先断开连接
if(NULL!= g_handle)
{
ZAux_Close(g_handle);
g_handle = NULL;
}
//从IP下拉框中获取IP
GetDlgItemText(IDC_COMBOX_IP, buffer, 255);
buffer = \0;
//通过PC函数库提供的连接控制器的函数接口(API),连接控制器
iresult = ZAux_OpenEth(buffer, g_handle);
if(ERR_SUCCESS!= iresult)
{
g_handle = NULL;
MessageBox(_T(链接失败));
SetWindowText(未链接);
return;
}
SetWindowText(已链接);
//启动定时器
SetTimer(1, 100, NULL);
SetTimer(2, 100, NULL);
//初始化轴参数
for(inti = 0; i4; i++)
{
ZAux_Direct_SetAtype(g_handle, i, 1); //轴类型
ZAux_Direct_SetUnits(g_handle, i, 1000); //脉冲当量
ZAux_Direct_SetSpeed(g_handle, i, 100); //速度
ZAux_Direct_SetAccel(g_handle, i, 1000); //加速度
ZAux_Direct_SetDecel(g_handle, i, 1000); //减速度
ZAux_Direct_SetSramp(g_handle, i, 100); //S曲线时间
}
}
4/11通过定时器1更新控制器轴0-3的位置信息和速度信息。
//定时器
voidCMergeDlg::OnTimer(UINT_PTRnIDEvent)
{
if(NULL== g_handle)
{
MessageBox(_T(链接断开));
return;
}
switch(nIDEvent)
{
case1: //更新控制器轴0-3的位置信息和速度信息
CStringXpos, Xmspeed;
CStringYpos, Ymspeed;
CStringZpos, Zmspeed;
CStringUpos, Umspeed;
float showpos = { 0 };
floatmspeed = { 0 };
int status = 0;
//获取当前轴位置
ZAux_Direct_GetAllAxisPara(g_handle, DPOS, 4, showpos);
Xpos.Format(X: %.2f, showpos);
Ypos.Format(Y: %.2f, showpos);
Zpos.Format(Z: %.2f, showpos);
Upos.Format(U: %.2f, showpos);
GetDlgItem(IDC_XPOS)-SetWindowText(Xpos);
GetDlgItem(IDC_YPOS)-SetWindowText(Ypos);
GetDlgItem(IDC_ZPOS)-SetWindowText(Zpos);
GetDlgItem(IDC_UPOS)-SetWindowText(Upos);
//判断主轴状态(即BASE的第一个轴)
ZAux_Direct_GetIfIdle(g_handle, 0, status);
if(status == -1)
{
GetDlgItem(IDC_RUNSTATUS)-SetWindowText(运动状态:停止中);
}
else
{
GetDlgItem(IDC_RUNSTATUS)-SetWindowText(运动状态:运动中);
}
//更新轴速度
ZAux_Direct_GetAllAxisPara(g_handle, MSPEED, 4, mspeed);
Xmspeed.Format(X轴速度: %.2f, mspeed);
Ymspeed.Format(Y轴速度: %.2f, mspeed);
Zmspeed.Format(Z轴速度: %.2f, mspeed);
Umspeed.Format(U轴速度: %.2f, mspeed);
GetDlgItem(IDC_SPEED_X)-SetWindowText(Xmspeed);
GetDlgItem(IDC_SPEED_Y)-SetWindowText(Ymspeed);
GetDlgItem(IDC_SPEED_Z)-SetWindowText(Zmspeed);
GetDlgItem(IDC_SPEED_U)-SetWindowText(Umspeed);
break;
}
CDialogEx::OnTimer(nIDEvent);
}
5/11通过启动按钮的事件处理函数来启动连续插补运动。
//启动按钮
voidCMergeDlg::OnBnClickedButtonRun()
{
if(NULL== g_handle)
{
MessageBox(_T(链接断开));
return;
}
UpdateData(true);//刷新参数
intcorner_mode = 0;
intaxislist = { 0,1,2,3 }; //运动BASE轴列表
floatdislist1 = { 0 }; //运动距离列表
floatdislist2 = { 0 };
floatdislist3 = { 0 };
//选择参与运动的轴,第一个轴为主轴,插补参数全用主轴参数
ZAux_Direct_SetSpeed(g_handle, axislist, M_Speed); //速度
ZAux_Direct_SetAccel(g_handle, axislist, M_Accel); //加速度
ZAux_Direct_SetDecel(g_handle, axislist, M_Decel); //减速度
ZAux_Direct_SetSramp(g_handle, axislist, M_SRAMP); //S曲线时间
//设置拐角模式
if(m_mode1 == 1)
{
corner_mode = corner_mode + 2;
}
if(m_mode2 == 1)
{
corner_mode = corner_mode + 8;
}
if(m_mode3 == 1)
{
corner_mode = corner_mode + 32;
}
ZAux_Direct_SetCornerMode(g_handle, axislist, corner_mode);
//设置连续插补
ZAux_Direct_SetMerge(g_handle, axislist, m_mode);
//设置SP速度
ZAux_Direct_SetForceSpeed(g_handle, axislist, SP_Speed);
//设置开始.结束减速角度,转换为弧度
ZAux_Direct_SetDecelAngle(g_handle, axislist, StartAngle * 3.14 / 180);
ZAux_Direct_SetStopAngle(g_handle, axislist, StopAngle * 3.14 / 180);
//设置小圆限速半径
ZAux_Direct_SetFullSpRadius(g_handle, axislist, SP_Radius);
//设置拐角半径
ZAux_Direct_SetZsmooth(g_handle, axislist, CornerRadius);
//SP指令中自动拐角模式中设置一个较大的startmovespeed与endmovespeed
ZAux_Direct_SetStartMoveSpeed(g_handle, axislist, 10000);
ZAux_Direct_SetEndMoveSpeed(g_handle, axislist, 10000);
//更新运动数据
dislist1 = DPOS_X_1; dislist1 = DPOS_Y_1;
dislist1 = DPOS_Z_1; dislist1 = DPOS_U_1;
dislist2 = DPOS_X_2; dislist2 = DPOS_Y_2;
dislist2 = DPOS_Z_2; dislist2 = DPOS_U_2;
dislist3 = DPOS_X_3; dislist3 = DPOS_Y_3;
dislist3 = DPOS_Z_3; dislist3 = DPOS_U_3;
//开始运动
ZAux_Direct_Move(g_handle, 4, axislist, dislist1);
ZAux_Direct_Move(g_handle, 4, axislist, dislist2);
ZAux_Direct_Move(g_handle, 4, axislist, dislist3);
}
6/11通过停止按钮的事件处理函数来停止插补运动。
//停止按钮
voidCMergeDlg::OnBnClickedButtonStop()
{
if(NULL== g_handle)
{
MessageBox(_T(链接断开));
return;
}
ZAux_Direct_Single_Cancel(g_handle, 0, 2); //停止主轴 BASE的一个轴
}
7/11轴坐标清零。
//坐标清零
voidCMergeDlg::OnBnClickedButtonClear()
{
if(NULL== g_handle)
{
MessageBox(_T(链接断开));
return;
}
for(inti = 0; i4; i++)
{
ZAux_Direct_SetDpos(g_handle, i, 0); //DPOS设为零
}
}
8/11编译运行演示。
1)编译运行示教例程。
 9/11
9/112)同时通过ZDevelop软件连接同一个控制器,对运动控制的轴参数进行监控。
A.连续插补加自动倒角的位置波形。
 10/11
10/11接上:B.不开启连续插补的速度波形。


 11/11
11/11接上:C.连续插补加合适的拐角减速的速度波形。


 注意事项
注意事项本次,正运动技术的C++开发之VS(MFC)就分享到这里,更多正运动运动控制器和运动控制卡的使用介绍,请关注“正运动小助手”公众号。
版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_411047.html