 订阅
订阅怎样设置ABB机器人碰撞检测?
来源:网络收集 点击: 时间:2024-04-12【导读】:
碰撞检测的主要作用是减少碰撞力对机器人本体的影响,避免机器人本体或者外围设损坏。它比一般地运动侦测功能更为灵敏,当碰撞发生时,机器人会立即停止,并沿之前的行走路径往反方向移动一小段距离以释放残余应力。当碰撞报警被确认之后,不需要重新上电,机器人就可以继续沿着之前的路径继续工作。工具/原料more电脑ABB仿真软件方法/步骤1/6分步阅读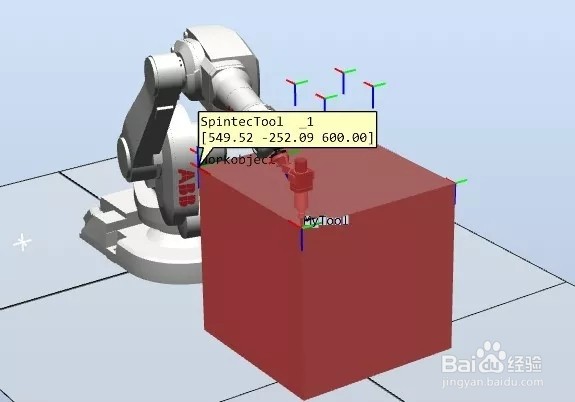 2/6
2/6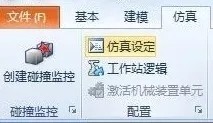 3/6
3/6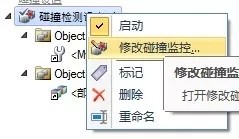 4/6
4/6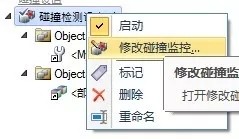 5/6
5/6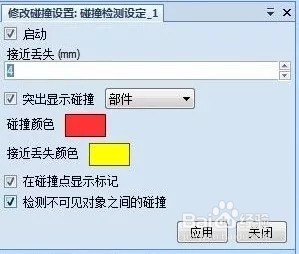 启程自动化培训ABB机器人培训
启程自动化培训ABB机器人培训
机器人做好轨迹后,可以通过碰撞检测来检查机器人工具是否和工件碰撞,如下图,机器人工具在该位置与工件相撞
2/6仿真-创建碰撞监控
3/6把要检测的两个对象拖入
4/6右击,设置
5/6修改碰撞提示的颜色等
6/6有时候工具等也不能太接近工件,接近丢失即设置工具和工件在该范围内,报警
启程自动化培训ABB机器人培训 版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_492550.html
上一篇:红米手机桌面如何设置为4*6
下一篇:民间传统竹编簸箕用于晾晒,我们该如何选择?