 订阅
订阅ABB机器人视觉通讯定位引导
来源:网络收集 点击: 时间:2024-04-25【导读】:
包含ABB机器人和视觉系统的硬件连接、系统通讯建立,并提取数据进行引导定位。工具/原料moreABB机器人视觉系统方法/步骤1/11分步阅读 2/11
2/11 3/11
3/11 4/11
4/11 5/11
5/11 6/11
6/11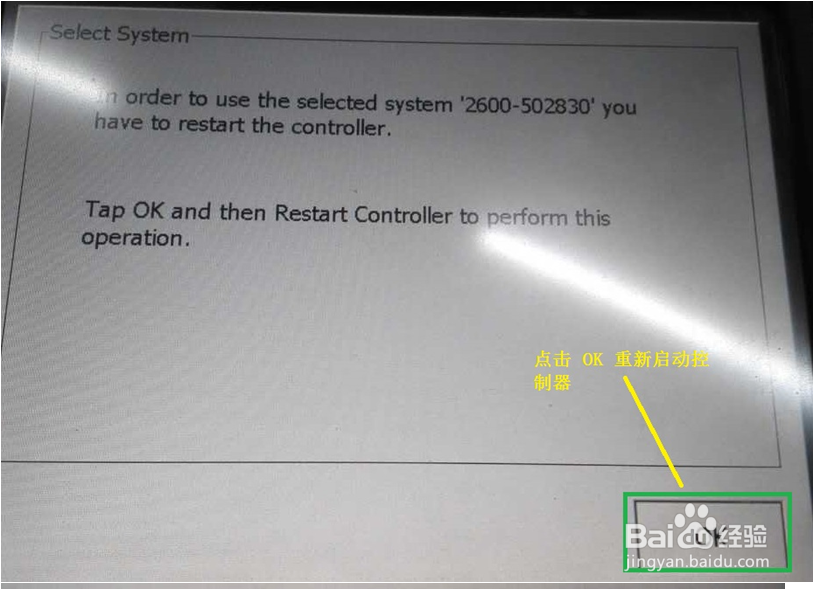 7/11
7/11 8/11
8/11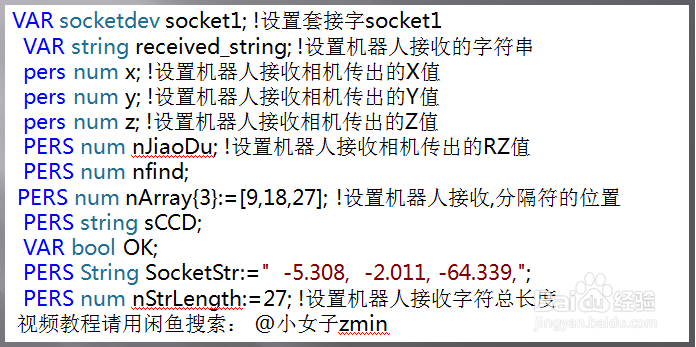 9/11
9/11 10/11
10/11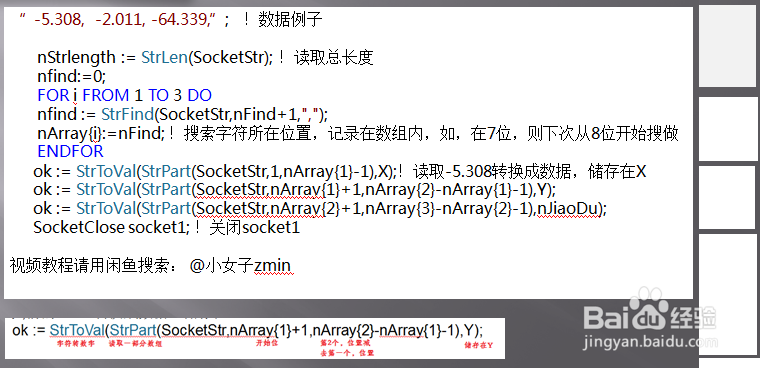 11/11
11/11
设置WAN口IP地址
进入ABB主菜单,选择重启系统,选择 高级
2/11启动引导应用程序
3/11点击Settings
4/11设置IP地址,需要和视觉在同一网段
设置好后点 OK
5/11选择我们要启动的机器人系统后点击Close
6/11点击OK
7/11将视觉网线插入WAN口
8/11设置相关数据
!后的数据为注释使用,实际编程可忽略
9/11以下为创建套接字连接以及发送拍照命令的对话
很多康耐视In-sighn相机需要先输入账号密码登录后才能接收拍照命令。
10/11数据提取,分别储存在X\Y\nJiaoDu
11/11视觉数据引用案例
版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_590593.html
上一篇:小儿推拿之日常保健穴位
下一篇:ACCESS设置是否类型的需要重印否字段