 订阅
订阅数控机床各坐标轴与其方向的判定
来源:网络收集 点击: 时间:2024-04-18数控车床坐标轴及方向的判定:
Z轴为数控车床主轴轴线方向,以刀具远离工件的方向定义为Z轴的正方向;
X轴为数控车床(卡盘)的直径方向,且平行于横向托板,以刀具离开工件旋转中心的方向为X轴的正方向。
 2/5
2/5立式三轴数控铣床(三轴加工中心)坐标轴及方向判定:
1、Z坐标
Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴为Z坐标,Z坐标的正向为刀具离开工件的方向。
2、X坐标
X坐标平行于工件的装夹平面,一般在水平面内,观察者面对刀具主轴向立柱看,+X运动方向指向右方。
3、Y坐标
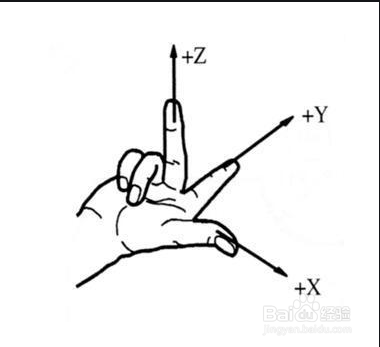
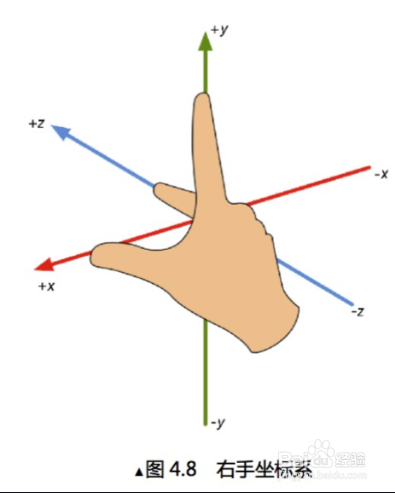
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右手直角坐标系来确定Y坐标的方向。

 3/5
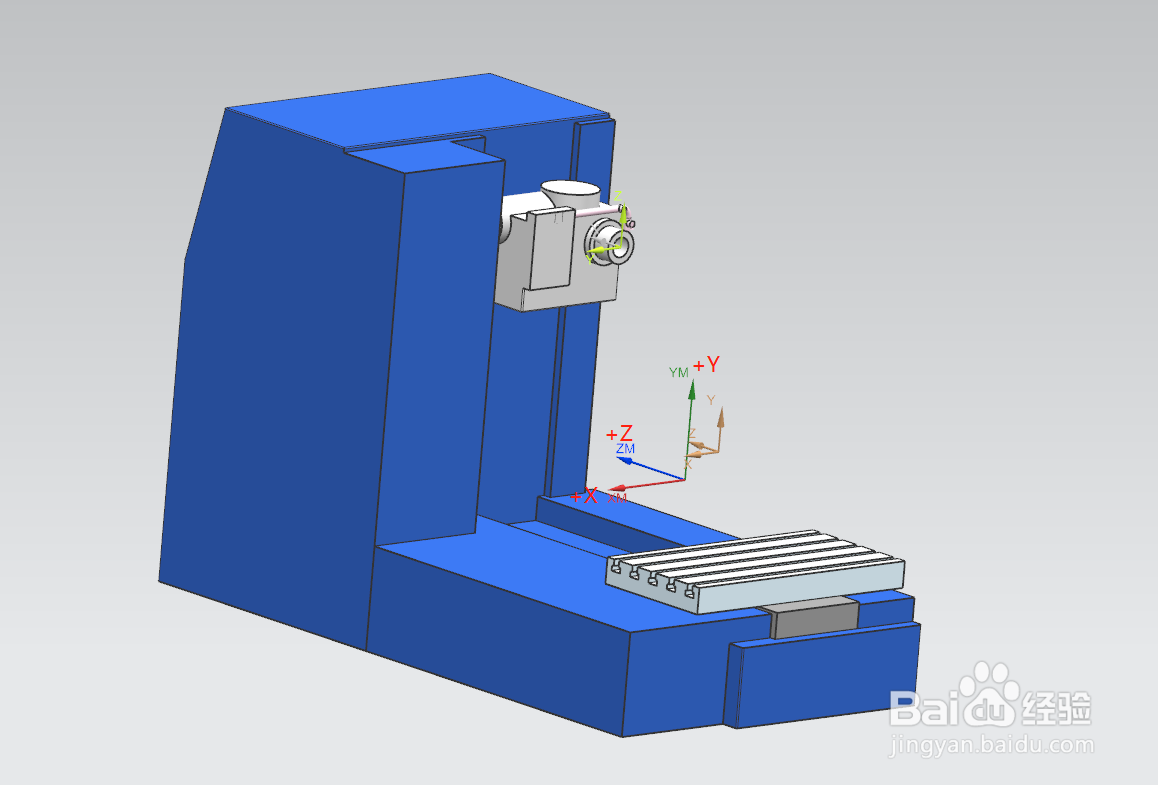
3/5卧式三轴数控铣床(三轴加工中心)坐标轴及方向判定:
1、Z坐标
Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴为Z坐标,Z坐标的正向为刀具离开工件的方向。
2、X坐标
X坐标平行于工件的装夹平面,一般在水平面内,观察者沿刀具主轴向工件看,+X运动方向指向右方。
3、Y坐标
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右手直角坐标系来确定Y坐标的方向。
 4/5
4/5五面龙门加工中心的坐标轴判定:
1、Z坐标
Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴为Z坐标,Z坐标的正向为刀具离开工件的方向。
2、X坐标
X坐标平行于工件的装夹平面,一般在水平面内,观察者面对刀具主轴向立柱看,+X运动方向指向右方。
3、Y坐标
在确定X、Z坐标的正方向后,可以用根据X和Z坐标的方向,按照右手直角坐标系来确定Y坐标的方向(即平行于龙门横梁)。
4、五面龙门加工中心又加了一个绕主轴(Z轴)旋转的轴——C轴。根据右手笛卡尔坐标系,让右手大拇指指向Z轴正方向,弯曲的四指就是旋转轴的正方向。如下图:
 5/5
5/5四轴、五轴加工中心的各坐标轴的判定:
1、Z轴一般由传递动力的主轴来确定,即平行于机床主轴的坐标轴为Z轴,远离工件的方向为正方向。
2、再根据右手笛卡尔坐标系判断X轴为水平方向与工件平行,且垂直于Z轴。剩下的那个轴就是Y轴。X、Y轴的正方向都是远离工件。
3、绕着X轴旋转的轴就是A轴。根据右手大拇指指向X轴正方向,弯曲的四指就是旋转轴的正方向。同理,绕着Y轴旋转的轴就是B轴,绕着Z轴旋转的轴就是C轴。


 注意事项
注意事项个人原创经验,希望给你带来帮助。
此经验仅供参考,实际生产中详细阅读说明书。
版权声明:
1、本文系转载,版权归原作者所有,旨在传递信息,不代表看本站的观点和立场。
2、本站仅提供信息发布平台,不承担相关法律责任。
3、若侵犯您的版权或隐私,请联系本站管理员删除。
4、文章链接:http://www.1haoku.cn/art_534835.html